多字多图预警,关于 RLC 串并联谐振网络和二阶系统的个人理解和总结,希望能对大家之后的电路设计有所帮助。
1 前言
在模拟电路设计中,二阶系统是一个非常基本同时也是非常重要的电路模块。相信大家在设计放大器、滤波器或者锁相环时,都或多或少地和它打过交道。在电路系统中,它是构成无数复杂功能模块的基础构件。无论是反馈环路、滤波器、射频放大器还是阻抗匹配网络中都能看到二阶系统的身影,其动态特性、稳定性和带宽都直接由二阶系统决定。
或许大家在设计电路时会碰到一些更高阶的系统,例如一个七阶的切比雪夫低通滤波器,看起来传递函数和零极点分布非常复杂,令人头疼。事实上,在工程实践中,几乎总是将高阶系统拆解成一系列一阶和二阶系统的级联或组合来进行分析和设计。这是因为二阶系统的分析理论已经非常成熟,且其传函特性能够直观地描述系统在频域和时域的行为。通过将高阶传递函数分解为多个二阶因式的乘积,我们可以逐一设计每个二阶子系统,再将它们级联起来实现整体指标。这种方法大大的简化了设计和调试过程,从而使得实现高阶系统的手动调试变得可能。
因此完全可以说,掌握了二阶系统,就等于掌握了模拟设计中所有线性时不变系统的分析方法。在这篇文章中,本人将从基础的 RLC 串并联谐振电路开始,为大家逐渐梳理二阶系统的性质和分析方法,同时会分析一些具体的电路设计实例。希望帮助大家在面对各种看似复杂的电路时,能从二阶系统的角度找到一些分析思路。
2 RLC 串/并连谐振网络
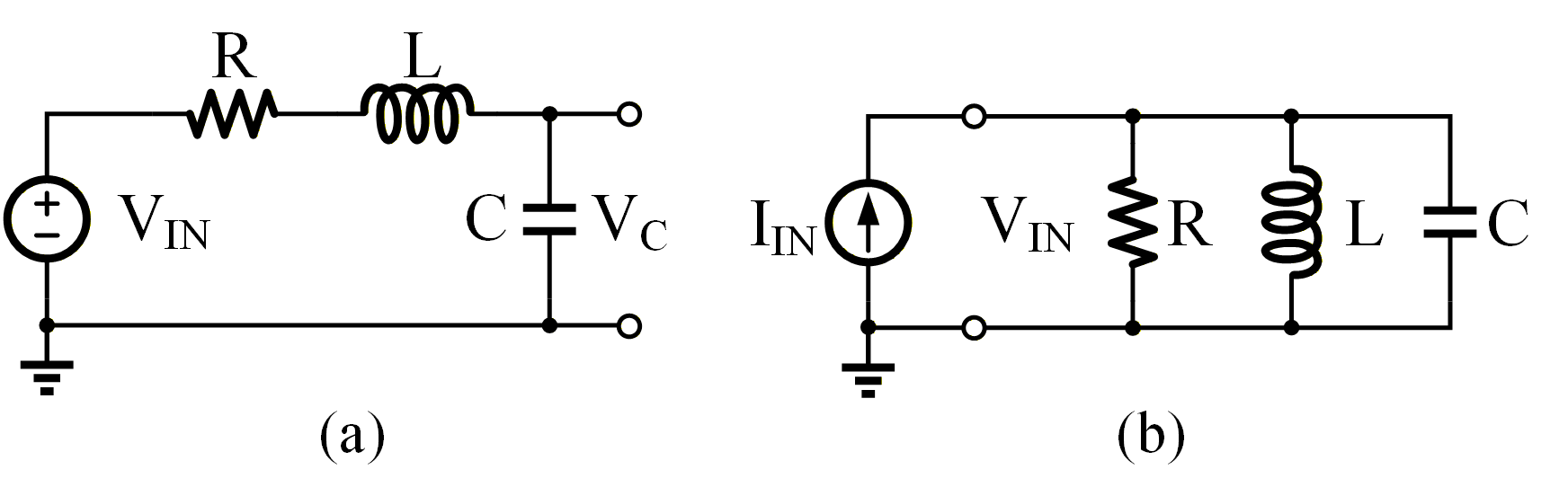
让我们从最基本的 RLC 串并联谐振网络开始介绍。RLC 串联谐振和并联谐振电路是最常见也是最常用到的两种谐振网络,分别如图 1(a) 和 (b) 所示。通常在分析 RLC 串联网络时输入为电压源,分析 RLC 并联网络时输入为电流源。
2.1 谐振的定义与计算方式
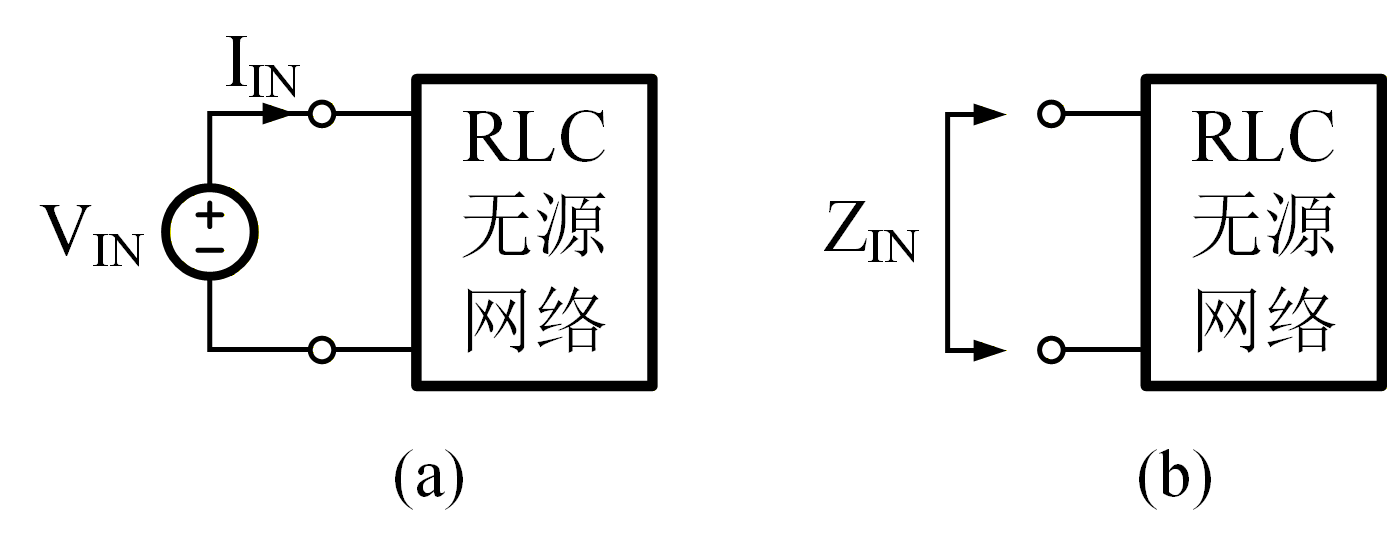
在《电路》书中,谐振被定义为:「含R、L、C的一端口电路,在特定条件下出现端口电压、电流同相位的现象时,称电路发生了谐振。」这也是大多数人接触谐振这个概念时学到的定义。如图 2(a) 所示,只要输入端口的电压和电流的在某个频率下相位相同,就可以说这个 RLC 电路发生了谐振现象。
当电流和电压相位相同时,此时整体电路的输入阻抗会呈现为纯阻性(即图 2(b) 中 ${Z}_{IN} = R$),由此就可以得到谐振的一个等价定义:「含R、L、C的一端口电路,当输入阻抗(或者导纳)的虚部在某个输入频率下为 0,即可以说电路在该频率下发生了谐振。」
由此可以得到一个在电路设计中常用的谐振频率计算方式:
$${IM}(Z_{IN}(j\omega)) = 0,\ {IM}(Y_{IN}(j\omega)) = 0$$这种计算方式简单直观,在集成电路设计中被广泛应用。下文对于谐振频率的计算也同样会采用这种方式进行。
2.2 RLC 串联谐振网络
在集成电路设计中,为了扩展带宽,通常会在一个模块的输出和另一个模块的输入之间串联一个电感。此时由于电路模块的输入端通常为 MOS 晶体管的寄生电容,因此第一个模块的输出到第二个模块的输入之间的电路可以等效为一个串联谐振网络,如图 3 所示。
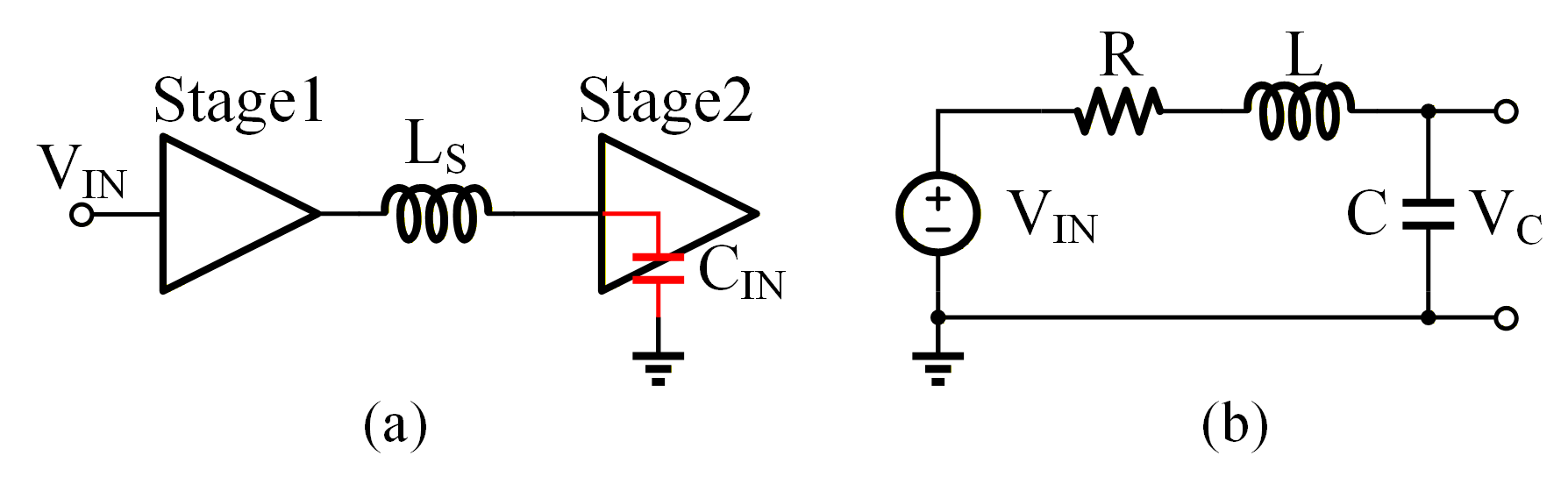
图 3(b) 中的串联电阻 R 通常来源于图 3(a) 中电感 $L_S$ 的寄生电阻。对于该串联谐振网络,可以通过计算输入阻抗并使其虚部为 0 的形式求得谐振点。RLC 串联网络的阻抗可以表示为:
$$Z_{IN} = R + j\omega L + \frac{1}{j\omega C}$$根据谐振条件,需要输入阻抗虚部为 0,由此可以求出串联 RLC 谐振网络的谐振频率为:
$$\omega_{0} = \frac{1}{\sqrt{LC}}$$这个公式相信大家一定都非常熟悉。由此可知串联谐振电路的谐振点只有一个,并且谐振频率只与 L 和 C 值有关。该频率也被称为自由振荡角频率,即为 L 和 C 在没有任何阻尼(R)存在的情况下自由振荡的频率。
此时,由于输入阻抗的虚部为 0,整体输入阻抗将等于 R,体现为一个纯电阻。从电路上来看,串联电感 L 和电容 C 串联的阻抗将变为 0 ,就好像是完全变成了一根「导线」,它们的阻抗特性完全消失了,就像完全短路了一样。这是一个非常重要的观察结论。在实际的电路设计中,如果电路网络中存在多个 LC 谐振单元,当电路输入频率符合某个串联 LC 谐振单元的谐振频率时,在该频率下分析电路时,这个串联 LC 谐振单元可以看作短路。
2.2.1 谐振点电压/电流特性
计算出谐振频率后,就可以进一步分析谐振点的电流和电压特性了。由于串联电路电流相等,因此从电流入手分析会较为方便。谐振时,整体电路的输入阻抗等于电阻 R,那么整体的电流可以计算为:
$$I_{ser} = \frac{V_{IN}}{R}$$得到电流后,即可计算各模块的电压值。首先是电阻 R,易得电阻上的电压为 $V_{IN}$,等于电源电压。从这一点看,电感和电容在串联谐振时的总压降为 0,相当于一根导线,进一步说明了串联谐振 LC 相当于短路的这个特性。
对于电感,可以计算出它上面的压降为:
$$V_{L} = j\omega L \cdot \frac{V_{IN}}{R} = j\frac{1}{\sqrt{LC}} \cdot L \cdot \frac{V_{IN}}{R} = j \cdot \frac{1}{R} \sqrt{\frac{L}{C}} \cdot V_{IN}$$通过该表达式可以看出,串联谐振时电感上的实际电压降并不为 0,而是一个与输入电压和电路参数相关的值。在最终的电压表达式中存在一个 j,这意味着电感上的电压相比于输入电压有 90° 的相移。同时,电感上的电压相较于输入电压乘上了一个系数 $\frac{1}{R} \sqrt{\frac{L}{C}}$。这意味着在特定的电路参数下(例如 R 足够小或者 L/C 足够大),电感上的电压降反而会高于输入电压。这是串联谐振的一个非常重要特性。利用这个特性,就可以利用串联 LC 结构对输入的电压信号进行放大。同时结合 LC 电路只存在一个谐振频率的特性,也可利用该特性对输入信号进行选频——即只对某个特定频率的输入信号会输出放大的信号。
对于电容上的电压,同样可以计算得:
$$V_{C} = \frac{1}{j\omega C} \cdot \frac{V_{IN}}{R} = -j \cdot \frac{1}{R} \sqrt{\frac{L}{C}} \cdot V_{IN}$$可以看出电容两端的电压与电感两端的电压大小相等,方向相反(相较于输入有 -90° 的相移)。电容与电感两端的电压相互抵消,整体电压降为 0,从而对外表现为短路。
在串联谐振中,L 和 C 上的电压相较于输入电压,均存在一个系数 $\frac{1}{R} \sqrt{\frac{L}{C}}$ 的差距。工程上将这个系数定义为谐振网络的 Q 值,即:
$$|V_{L}(j\omega_{0})| = |V_{C}(j\omega_{0})| = Q \cdot |V_{IN}|\\ Q = \frac{\omega_{0}L}{R} = \frac{1}{R} \cdot \frac{1}{\omega_{0}C} = \frac{1}{R} \sqrt{\frac{L}{C}}$$2.2.2 阻抗的频率特性
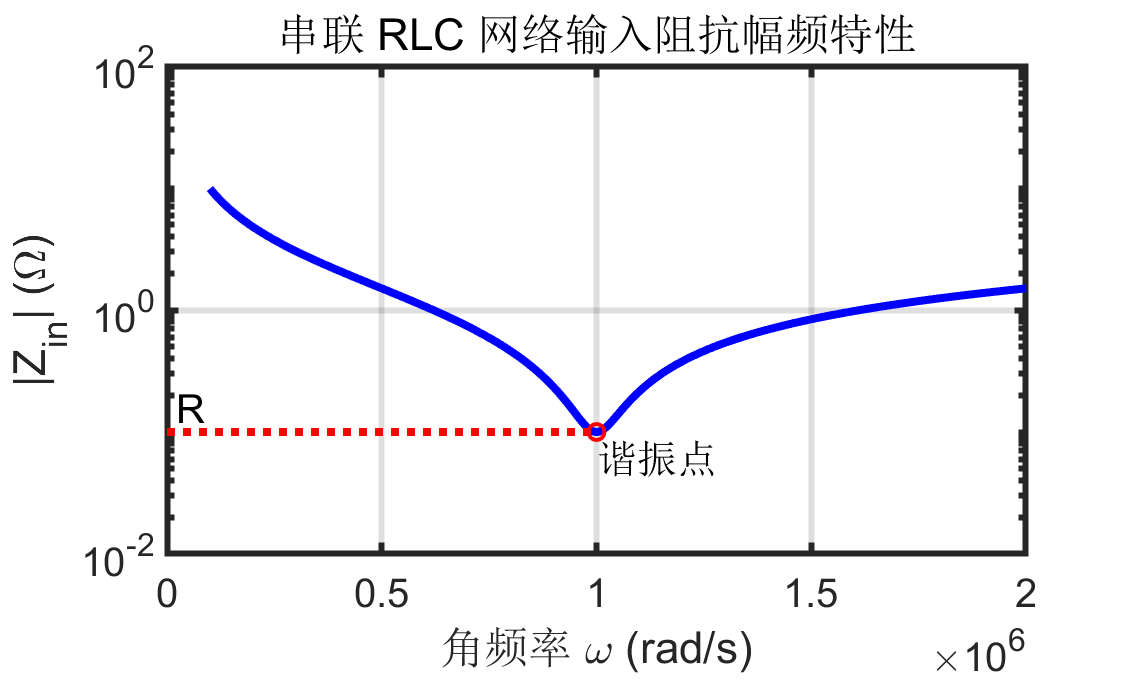
对于串联谐振网络,通常关注输入阻抗的幅频特性。该特性可以计算为:
$$ \begin{aligned} |Z_{IN}(j\omega)| &= \sqrt{R^2 + (\omega L – \frac{1}{\omega C})^2} \\ &= \sqrt{R^2 + (\frac{\omega}{\omega_{0}} \omega_{0} L – \frac{\omega_{0}}{\omega}\frac{1}{\omega_{0}C})^2}\\ &= R\sqrt{1+Q^2(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})^2} \end{aligned} $$该表达式在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均为无穷大,同时在 $\omega = \omega_{0}$ 时存在极小值为 R。其幅频特性曲线如图 4 所示。
2.2.3 元器件电压的频率特性
计算出输入阻抗的幅值后,就可以得到串联电流的幅频特性了。整体串联电流的幅频特性可以表示为:
$$|I_{ser}(j\omega)| = \frac{V_{IN}}{|Z_{IN}|}=\frac{V_{IN}}{R\sqrt{1+Q^2(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})^2}}$$该表达式在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均趋于 0,同时在 $\omega = \omega_{0}$ 时存在极大值为 $\frac{V_{IN}}{R}$。
得到串联电流的幅频特性后,即可计算各个元件的电压的幅频特性了。由于在芯片设计中,多数情况下是不需要考虑阻抗匹配的,此时放大电路一般关注其电压放大能力,因此在谐振电路分析中,电压特性尤为重要,这里将重点讲述。
(1) 电阻电压
首先是电阻上的电压,可以计算得出:
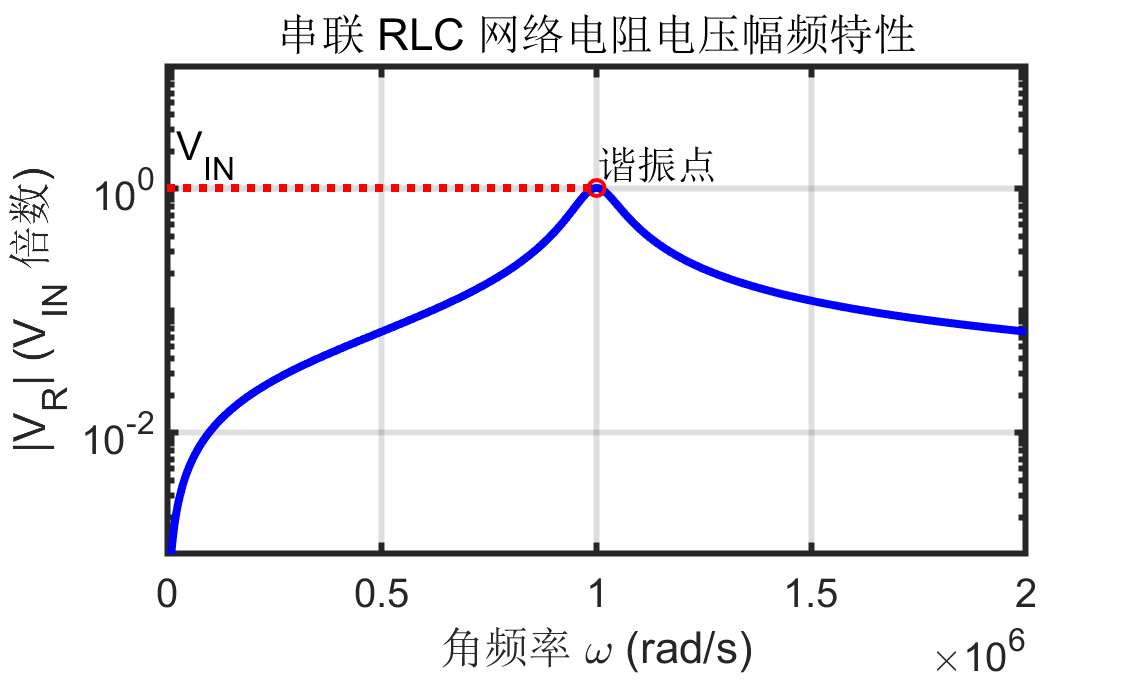
$$|V_{R}(j\omega)| = |I_{ser}(j\omega)| \cdot R = \frac{V_{IN}}{\sqrt{1+Q^2(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})^2}}$$可以简单分析出,电阻上的电压在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均趋于 0,同时在 $\omega = \omega_{0}$ 时存在极大值为 $V_{IN}$。整体电阻电压表达式体现为带通特性(即在低频和高频处不允许信号通过,只在中间某些频率处允许信号通过)。其频率特性如图 5 所示。
对于这样一个带通信号,我们可以计算出它的带宽。工程上的带宽通常指的是 3dB 带宽,即为电压增益下降到其峰值增益的 $1/\sqrt{2}$ 倍(即 -3dB,此时对应的功率下降为峰值功率的一半)时对应的频率范围。该范围内通常被称为通带,范围外通常被称为阻带,如图6所示。
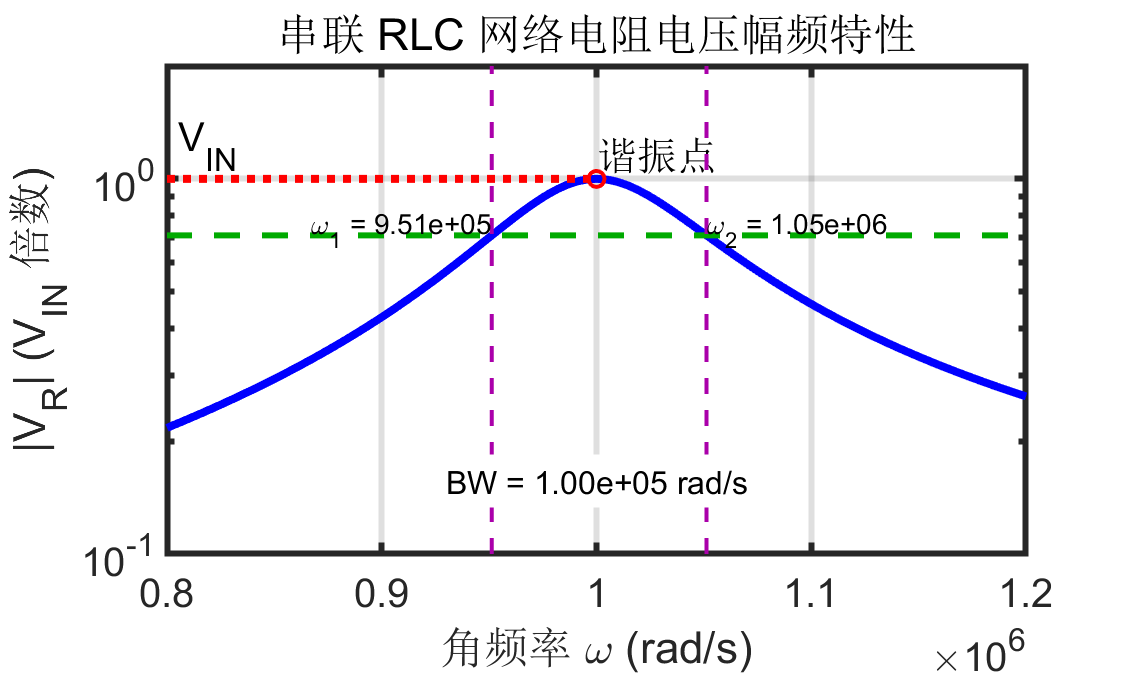
该范围可以通过电阻电压幅频特性表达式直接求出。可以看出,当 $Q(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega}) = 1$ 时即可满足 -3dB 增益条件。通过该表达式可以求出两个频率点,这两个频率点之间的差值就是这个电路的 -3dB 带宽。该表达式的两个根为:
$$ \begin{aligned} \omega_{j1} &= \omega_{0} \cdot \left\{-\frac{1}{2Q}+\sqrt{(\frac{1}{2Q})^2+1}\right\}\\ \omega_{j2} &= \omega_{0} \cdot \left\{+\frac{1}{2Q}+\sqrt{(\frac{1}{2Q})^2+1}\right\}\\ \end{aligned} $$由此可得通带带宽为:
$$BW = \omega_{j2} – \omega_{j1} \approx \frac{\omega_0}{Q}$$可以看出,BW 和电路的 Q 成反比。Q 值越大,BW 就越窄,对应的谐振网络的选择性就越好;反之 Q 值越低, BW 就越宽,对应的选择性就越差。谐振网络带宽与 Q 值的反比关系是谐振网络中的一条重要特性。
(2) 电感与电容电压
对于电感上的电压,通过串联电流和阻抗特性可以计算得出:
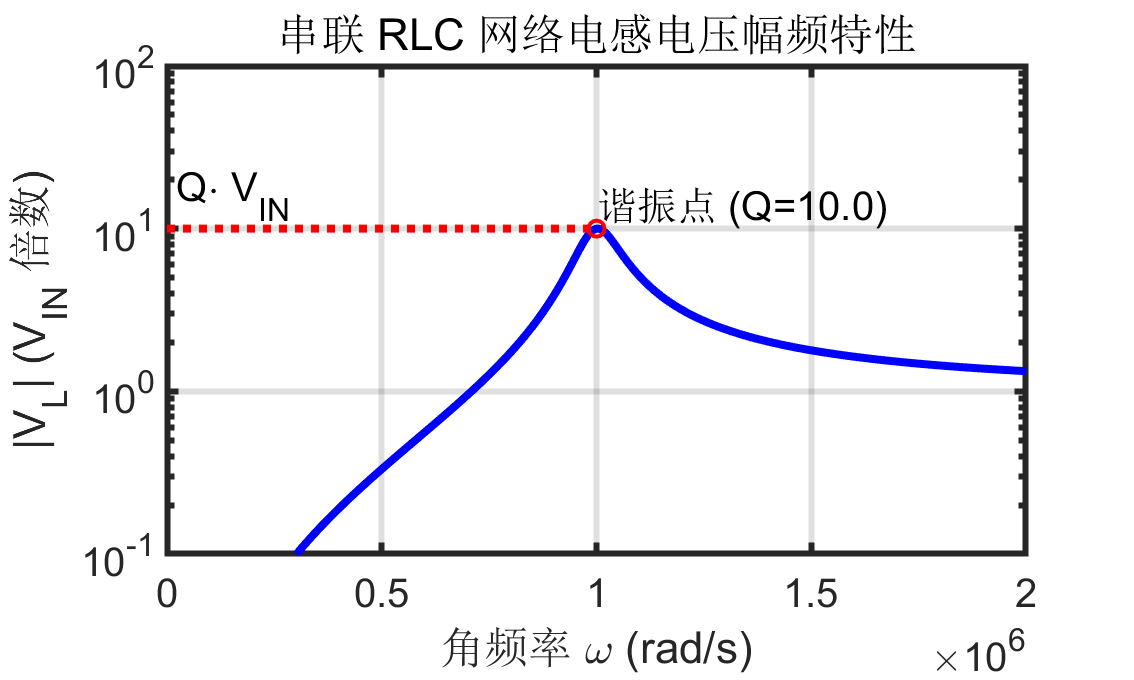
$$|V_{L}(j\omega)| = |I_{ser}(j\omega)| \cdot \omega L = \frac{\omega L}{R\sqrt{1+Q^2(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})^2}} \cdot V_{IN}$$利用高数中求极限的知识可以分析出,电感上的电压在 $\omega \to 0$ 时趋近于 0,在 $\omega \to \infty$ 时值均趋于 $V_{IN}$。同时根据前面的章节的谐振点电压电流特性分析,该表达式在 $\omega = \omega_{0}$ 时其值为 $Q \cdot V_{IN}$。整体电感电压表达式体现为高通特性(即在低频处不允许信号通过,在高频处允许信号通过),同时在谐振频率附近其电压会超过电源电压,存在 peaking。其频率特性如图 7 所示。
对于电容上的电压,同样可以通过串联电流和阻抗特性计算得出:
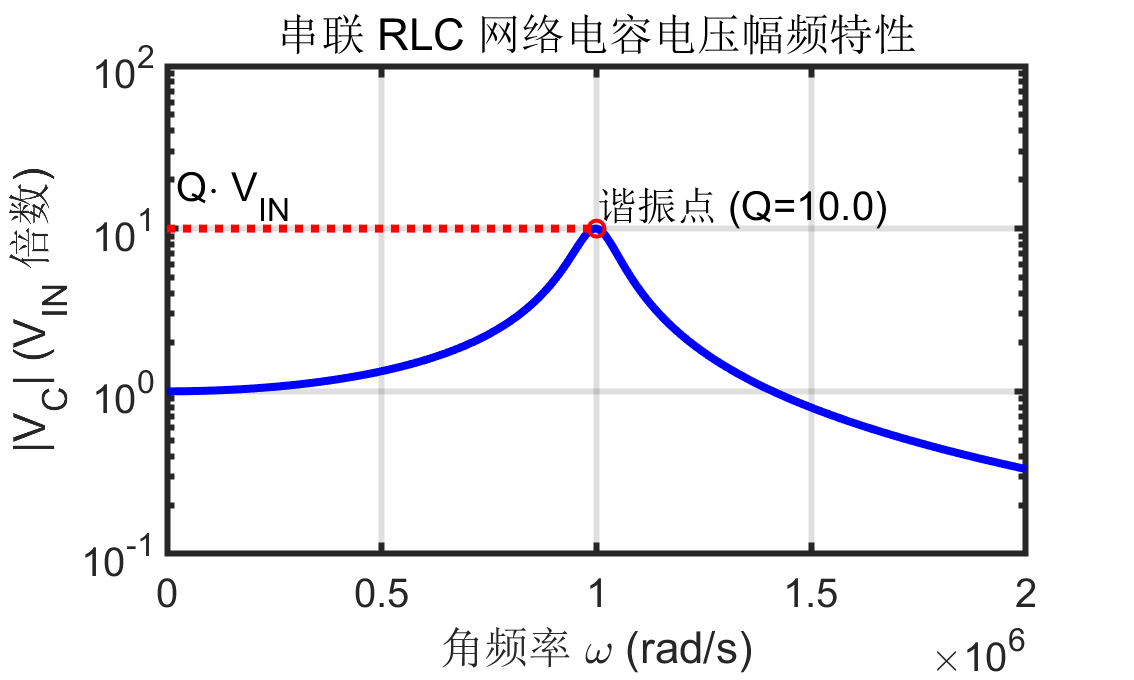
$$|V_{C}(j\omega)| = |I_{ser}(j\omega)| \cdot \frac{1}{\omega C} = \frac{1}{\omega CR \cdot \sqrt{1+Q^2(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})^2}} \cdot V_{IN}$$同样利用高数的知识可以分析出,电容上的电压在 $\omega \to 0$ 时趋近于 $V_{IN}$,在 $\omega \to \infty$ 时值均趋于 0。同时根据前面的章节的谐振点电压电流特性分析,该表达式在 $\omega = \omega_{0}$ 时其值为 $Q \cdot V_{IN}$。整体电感电压表达式体现为低通特性(即在低频处允许信号通过,在高频处不允许信号通过),同时在谐振频率附近其电压会超过电源电压,存在 peaking。其频率特性同样图 8 所示。
值得注意的是,在电感与电容电压的频率响应曲线中,谐振点并不是该曲线的峰值点。放大谐振频率附近并观察该曲线可以发现,对于电容和电感上电压的传递函数,可以发现其极值点分别位于谐振点的两边。如图 9 所示。
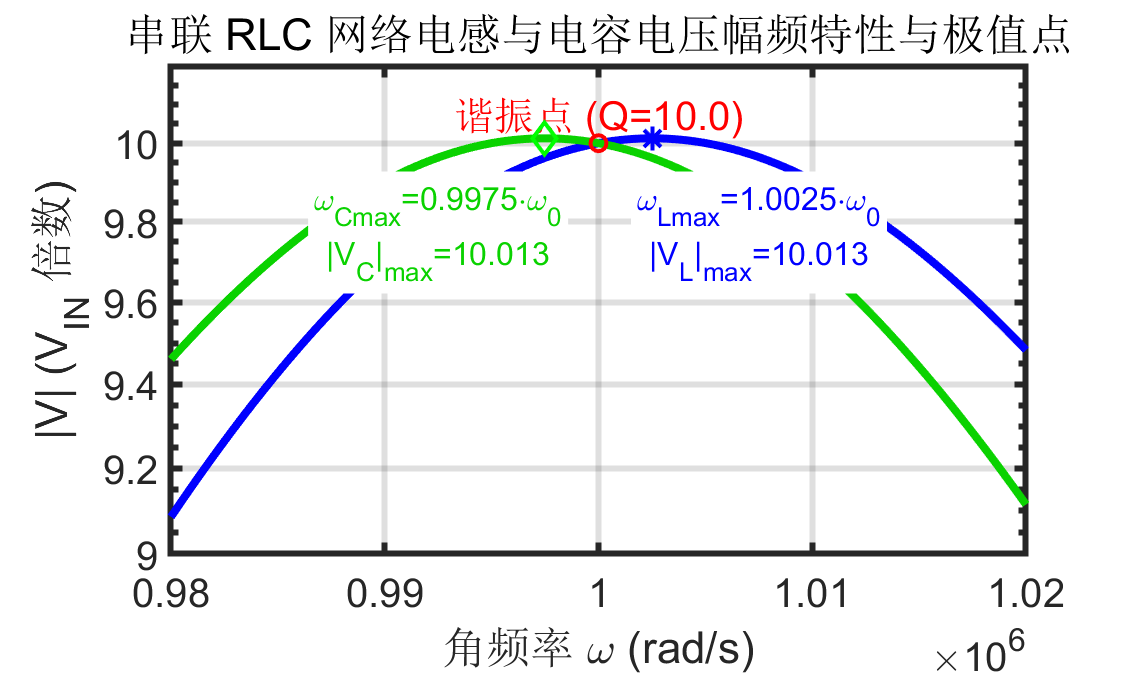
极值点频率可以通过对幅频特性传递函数求导获得,最终计算所得的极值点频率与对应的极大值为:
$$ \begin{aligned} \omega_{L,max} &= \frac{\omega_{0}} {\sqrt{1-\frac{1}{2Q^2}}}\\ \omega_{C,max} &= \omega_{0} \cdot \sqrt{1-\frac{1}{2Q^2}}\\ |V_{L,max}| &= |V_{C,max}| = \frac{Q}{\sqrt{1-\frac{1}{4Q^2}}} \end{aligned} $$通过表达式可以看出,当 Q 值升高时,传递函数的极值频率会向着谐振点靠拢,同时其对应的极值也将接近 Q 值。
(3) 相频特性
对于 RLC 串联谐振电路的相频特性,由于串联谐振电路电流相等,故 $\angle V_{C}(j\omega)$ 将滞后 $\angle V_{R}(j\omega)$ 90°,而 $\angle V_{L}(j\omega)$ 将超前 $\angle V_{R}(j\omega)$ 90°,因此只需要对 $\angle V_{R}(j\omega)$ 进行分析即可。
对于电阻上的电压,它的完整传递函数表达式为:
$$ V_{R}(j \omega) = \frac{V_{IN} \cdot R}{Z_{IN}(j\omega)} = \frac{V_{IN} \cdot R}{R+j(\omega L -\frac{1}{\omega C})} = V_{IN} \cdot \frac{1}{1+jQ(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega})} $$根据完整传递函数表达式,可以得出它的相频特性表达式为:
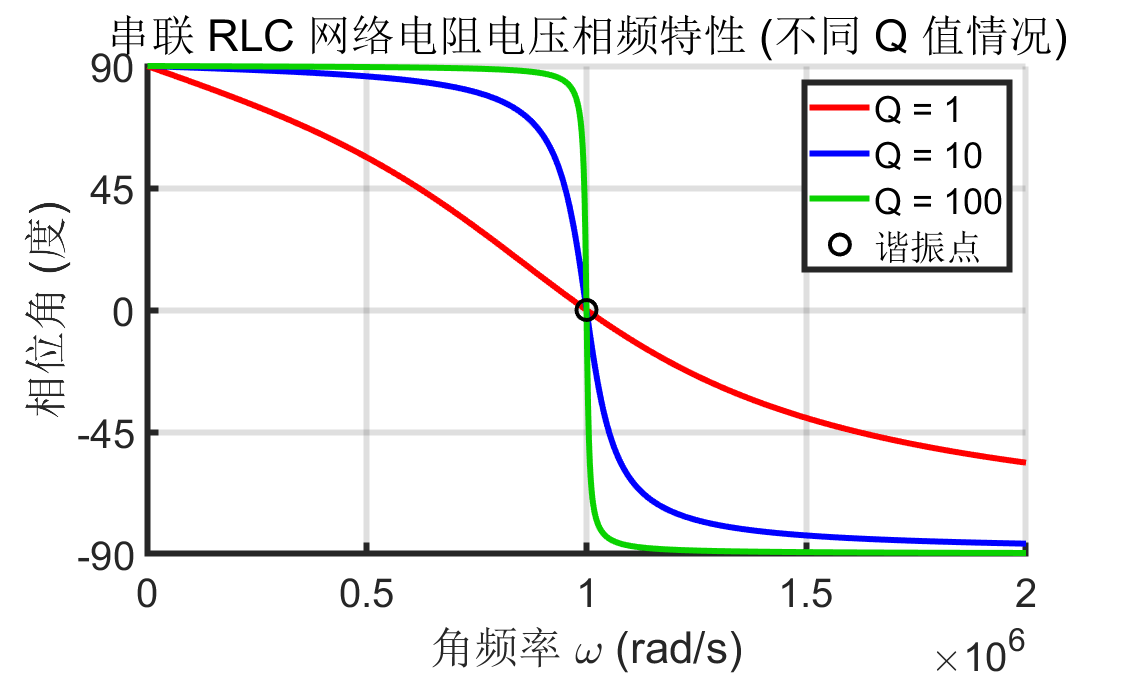
$$ \begin{aligned} &\angle V_{R}(\omega) = -\arctan \left[Q \left(\frac{\omega}{\omega_{0}} – \frac{\omega_{0}}{\omega}\right)\right]\\ &\left. \frac{d\angle V_{IN}}{d\omega} \right|_{\omega=\omega_0} = -\frac{2Q}{\omega_0} \end{aligned} $$该表达式在 $\omega \to 0$ 时趋近于 90°,在 $\omega \to \infty$ 时值均趋于 -90°,在谐振频率附近会发生 180° 的相位转换。Q值越高时,谐振频率附近相位变化的越快,斜率越大。其相频特性曲线如图 10 所示。
2.3 RLC 并联谐振网络
并联谐振网络是与串联谐振网络相对应的另一种形式。可以说只要将电阻换成电导,电流相等的分析方法换成电压相等,就可以用和分析串联谐振网络几乎完全相同的思路分析出并联谐振网络的特性。故这里只简要的对并联谐振网络的特性进行叙述。
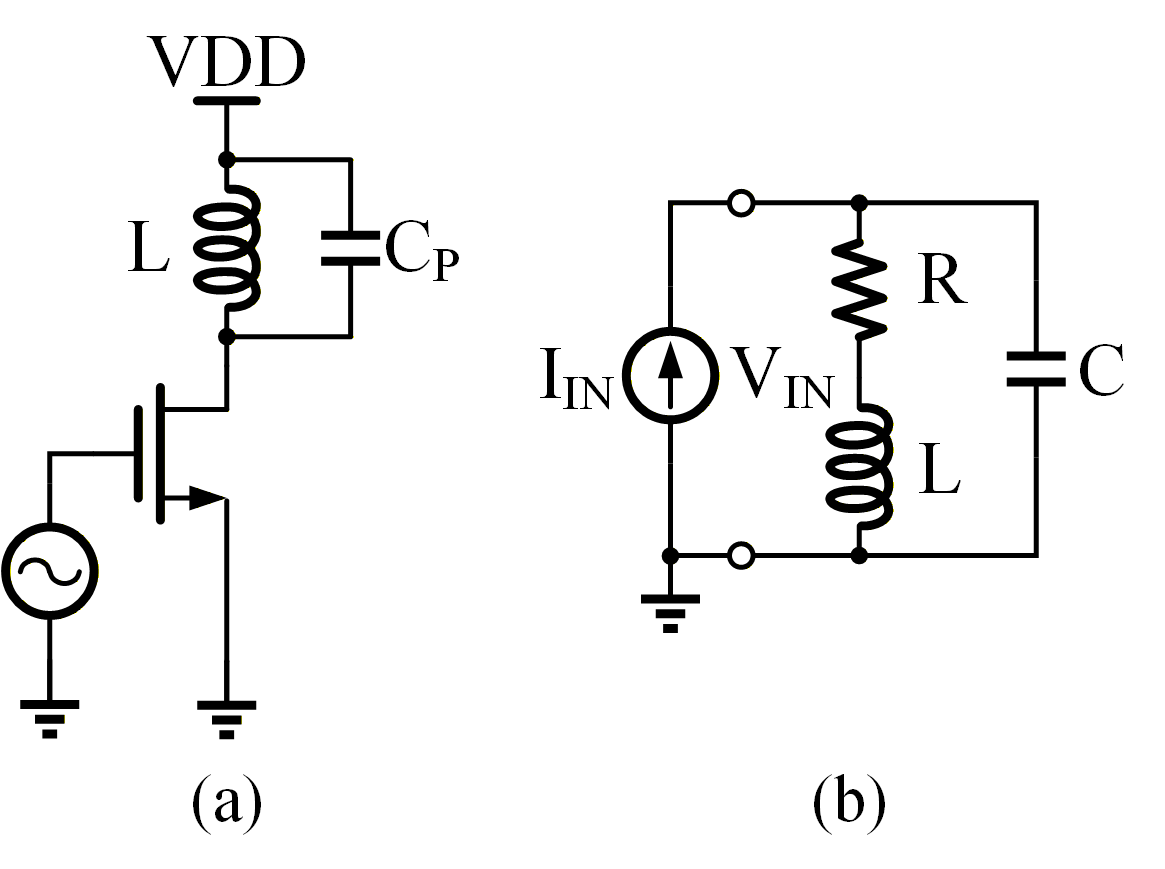
并联谐振网络通常出现在以电感为负载的射频放大器中,放大器的负载电感与输出电容(或者与并联在电感两端的选频电容)一起构成并联谐振网络,如图 11(a) 所示。并联谐振网络的输入通常是一个电流源,因此其等效电路如图 11(b) 所示。
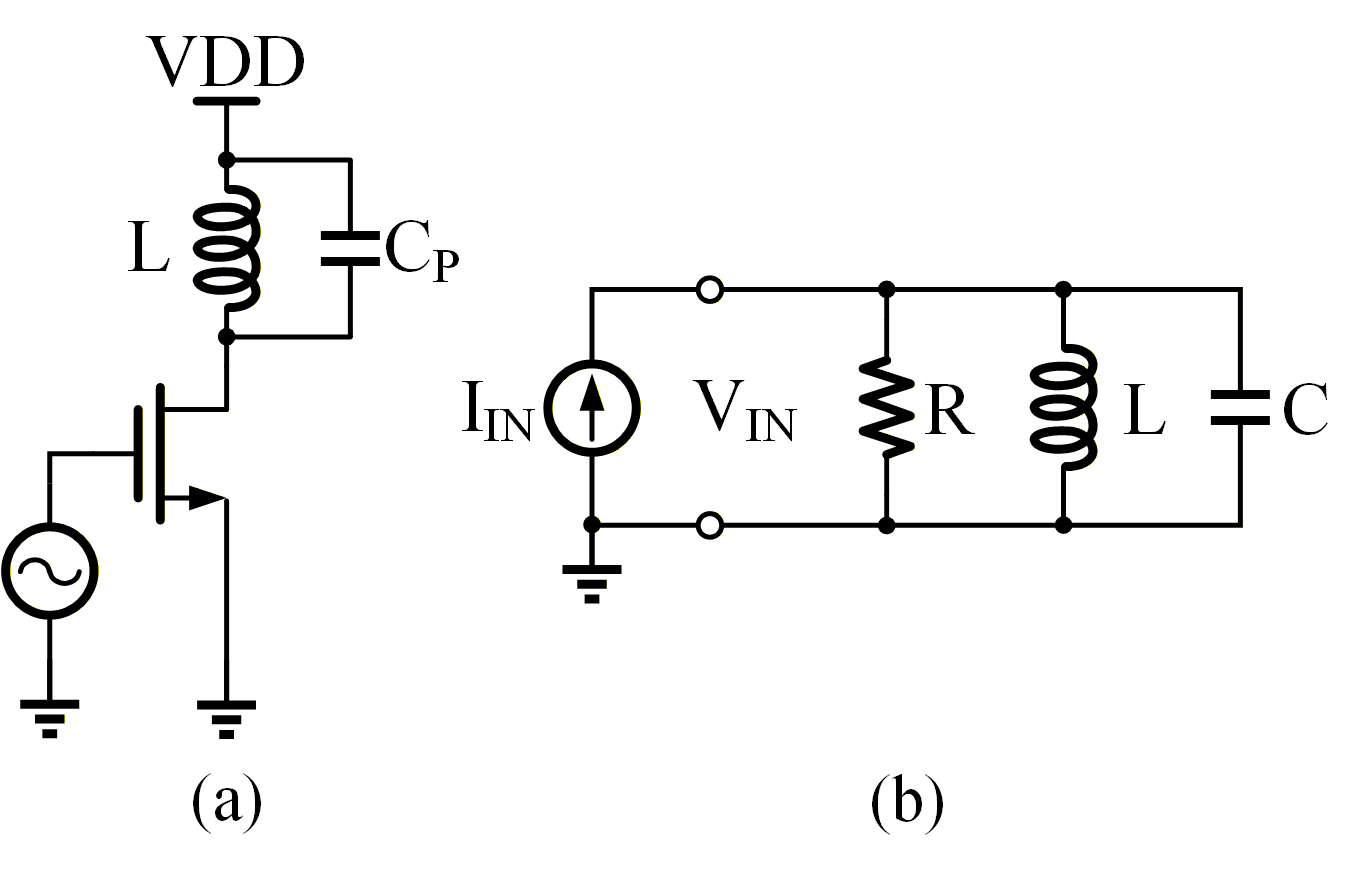
这时可能就会有人问了:通常情况下不因该是电感有一个串联寄生电阻,再整体和电容并联吗,图 11(b) 里为啥是一个电阻直接并联在 LC 两端?对于这个问题,大家先不要着急。虽然电感 L 串联电阻 R 再并联上电容 C 的情况更符合实际情况,但是使用目前这种完全并联形式的电路分析并联谐振会能更容易的获得一些直观上的结论。后续这边也会对电感 L 串联电阻 R 再并联上电容 C 的情况进行讲解,大家会发现在我们关心的谐振频率附近,这种更符合实际的情况也可以等效成 RLC 并联的情况进行分析。
对于 RLC 并联的情况,相较于计算输入阻抗,计算输入导纳会更简便。这种情况下的输入导纳为:
$$Y_{IN} = \frac{1}{R} – j\frac{1}{\omega L} + j\omega C$$根据谐振条件,需要输入导纳虚部为 0,由此可以求出并联 RLC 谐振网络的谐振频率为:
$$\omega_{0} = \frac{1}{\sqrt{LC}}$$可以看出该谐振频率和串联 RLC 谐振网络完全相同,并且同样只与 L 和 C 有关。此时由于输入导纳的虚部为 0,整体输入阻抗(导纳)将等于 R (1/R),体现为一个纯电阻。从电路上来看,串联电感 L 和电容 C 并联的导纳将变为 0,它们就好像被断路了,从而完全不存在一样。由此可以得出,并联谐振时 LC 相当于断路(即不存在)。
2.3.1 谐振点电压/电流特性
可以使用与串联谐振分析同样的思路计算并联谐振时的电压与电流特性。在谐振点处,并联 RLC 网络的总阻抗为 R,则此时并联网络的电压可以计算为:
$$V_{IN} = I_{IN} \cdot R$$得到并联电压后就可以计算各模块的电流值。对于电阻上的电流,可以非常容易的求出其谐振时的电流即为 $I_{IN}$,等于电流源电流。从这一点上可以进一步看出,此时电感 L 和电容 C 就好像不存在一样,电流全部流经电阻 R。这进一步说明了并联谐振可以看错断路的结论。
对于电感上的电流,根据谐振频率和并联电压即可得出:
$$I_{L} = \frac{V_{IN}}{j \omega_{0} L} = -j \cdot R\sqrt{\frac{C}{L}} \cdot I_{IN}$$与串联谐振类似,并联谐振时电感上的实际电流同样并不为 0,而是一个与输入电流和电路参数相关的值。该电流与输入电流之间有 -90° 的相移,同时其电流相较于输入电流乘上了一个系数 $R\sqrt{\frac{C}{L}}$。这意味着在特定的电路参数下,电感上的电流反而会高于输入电流。这是并联谐振的一个非常重要特性。
对于电容上的电流,同样可以计算得:
$$I_{C} = I_{IN}\cdot j \omega_{0} C = j \cdot R\sqrt{\frac{C}{L}} \cdot I_{IN}$$可以看出电容上面的电流与电感上面的电流大小相等,方向相反(相较于输入有 90° 的相移)。电容与电感上面流过的电流值相互抵消,这意味着电流只在电感和电容内部互相流动,整体流向外部的电流值为 0,从而对外表现为断路。
在串联谐振中,L 和 C 上的电流值相较于输入电流,均存在一个系数 $R\sqrt{\frac{C}{L}}$ 的差距。工程上将这个系数定义为并联谐振网络的 Q 值,即:
$$|I_{L}(j\omega_{0})| = |I_{C}(j\omega_{0})| = Q \cdot |I_{IN}|\\ Q = \omega_{0}CR = \frac{R}{\omega_{0}L} = R \sqrt{\frac{C}{L}}$$可以看出,并联谐振网络和串联谐振网络的 Q 值互为倒数。这与并联谐振网络和串联谐振网络在导纳阻抗以及输入电流电压的对偶性是相对应的。
2.3.2 阻抗的频率特性
在并联谐振中,通常计算其导纳会更加简便。其导纳的幅频特性可以表示为:
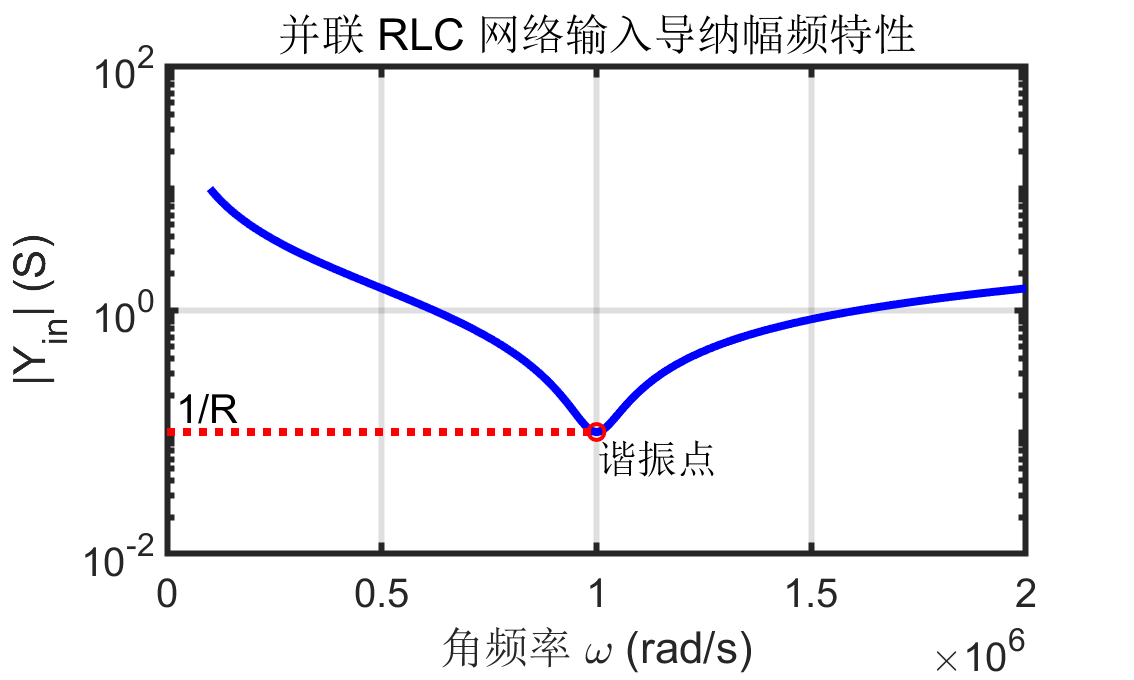
$$ \begin{aligned} |Y_{IN}(j\omega)| &= \sqrt{\frac{1}{R^2} + (\omega C – \frac{1}{\omega L})^2}\\ &= \frac{1}{R} \sqrt{1 + Q^2 \left( \frac{\omega}{\omega_0} – \frac{\omega_0}{\omega} \right)^2} \end{aligned} $$表达式在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均为无穷大,同时在 $\omega = \omega_{0}$ 时存在极小值为 1/R (此时对应的阻抗为 R)。其幅频特性曲线如图 12 所示。由于输入阻抗为输入导纳的倒数,并联谐振网络的输入阻抗在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均为 0,同时在 $\omega = \omega_{0}$ 时存在极大值为 R。
2.3.3 并联电压的频率特性
由于集成电路设计中通常主要关注谐振网络的电压特性,因此这里将只分析并联谐振网络的并联电压特性。对于电流特性大家可以参考串联谐振网络自行推导。
(1) 幅频特性
对于并联电压的幅频特性,可以通过输入电流乘上输入阻抗的方法计算得出。因此并联电压的表达式为:
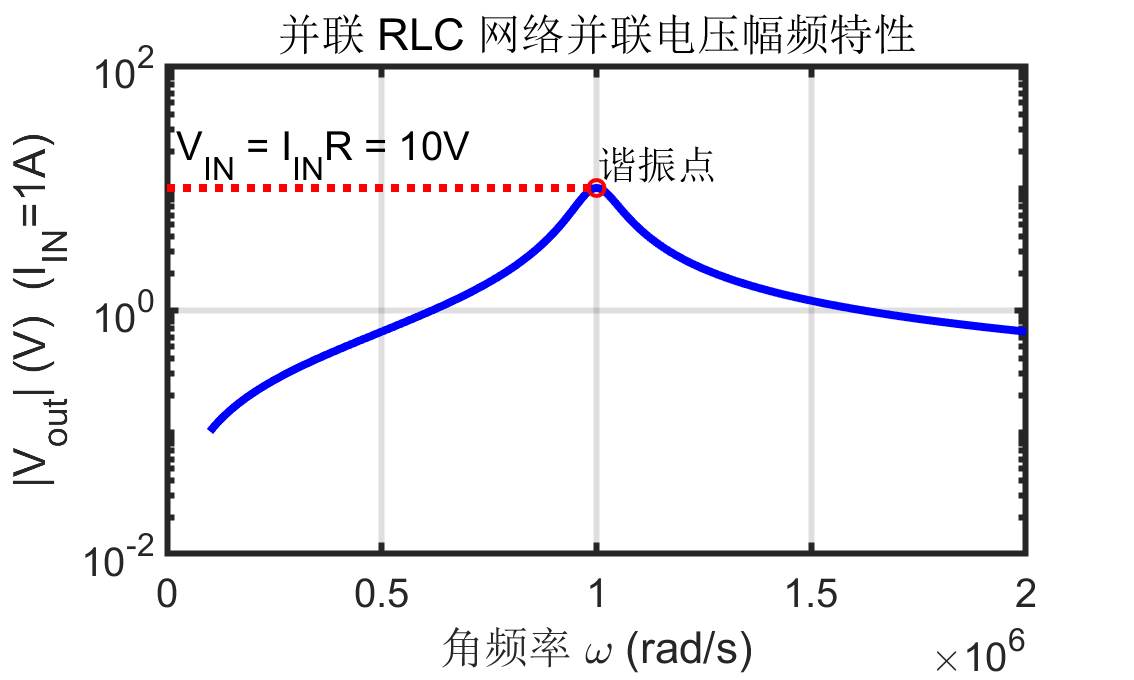
$$ |V_{IN}(j\omega)| = I_{IN} \cdot |Z_{IN}| = \frac{I_{IN} R}{\sqrt{1 + Q^2 \left( \frac{\omega}{\omega_0} – \frac{\omega_0}{\omega} \right)^2}} $$根据上一节可知,并联谐振网络的输入阻抗在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均为 0,同时在 $\omega = \omega_{0}$ 时存在极大值为 R。由此可以推导出并联谐振的输出电压在 $\omega \to 0$ 和 $\omega \to \infty$ 时值均为 0,同时在 $\omega = \omega_{0}$ 时存在极大值为 $I_{IN}R$。其幅频特性图像如图 13 所示。
对于这样一个带通信号,我们同样可以计算出它的带宽。其计算方法与串联谐振网络完全相同,这里不再赘述。其带宽表达式为:
$$BW \approx \frac{\omega_0}{Q}$$由此可知,与串联谐振网络相同,BW 和电路的 Q 成反比。Q 值越大,BW 就越窄,对应的谐振网络的选择性就越好;反之 Q 值越低, BW 就越宽,对应的选择性就越差。
(2) 相频特性
对于输入电压,它的完整传递函数表达式为:
$$ V_{\text{IN}}(j\omega) = \frac{I_{\text{IN}} R}{1 + jQ\left( \frac{\omega}{\omega_0} – \frac{\omega_0}{\omega} \right)} $$根据完整传递函数表达式,可以得出它的相频特性表达式为:
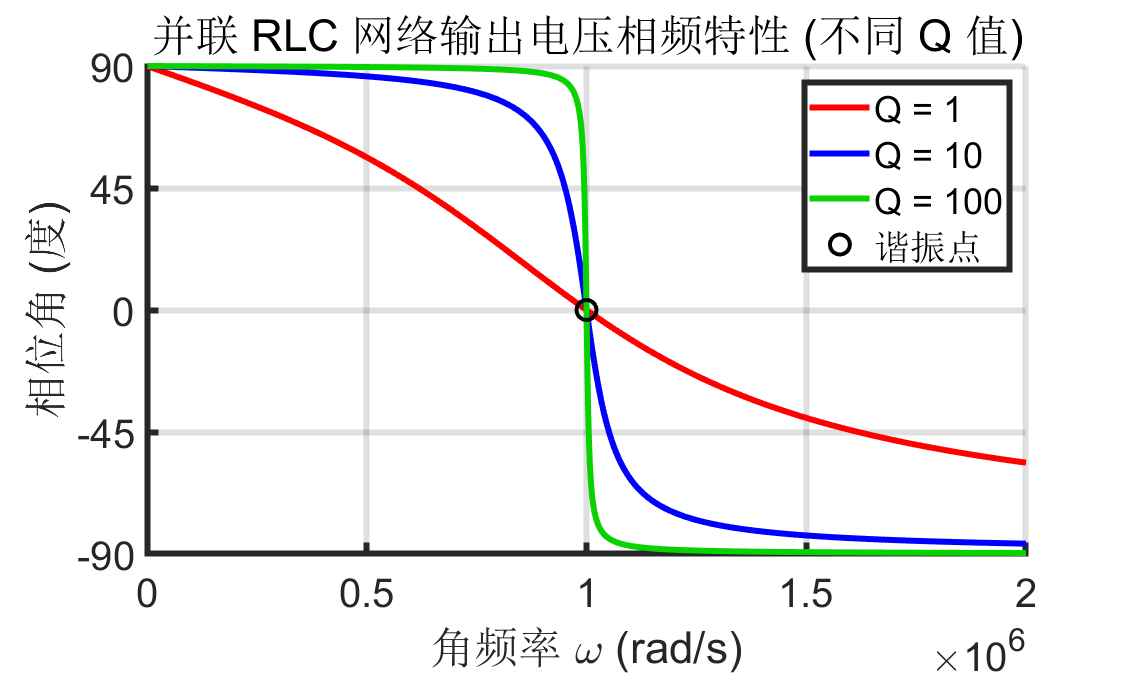
$$ \begin{aligned} &\angle V_{IN}(\omega) = -\arctan\left[ Q\left( \frac{\omega}{\omega_0} – \frac{\omega_0}{\omega} \right) \right]\\ &\left. \frac{d\angle V_{IN}}{d\omega} \right|_{\omega=\omega_0} = -\frac{2Q}{\omega_0} \end{aligned} $$可以看出,当使用 Q、$\omega$ 和 $\omega_0$ 表示后,并联谐振的表达式在形式上和串联谐振非常类似。与串联谐振相同,该表达式在 $\omega \to 0$ 时趋近于 90°,在 $\omega \to \infty$ 时值均趋于 -90°,在谐振频率附近会发生 180° 的相位转换。Q值越高时,谐振频率附近相位变化的越快,斜率越大。其具体的相频特性曲线图如图 14 所示。
2.4 电感带串联电阻的并联谐振网络
虽然在分析 RLC 并联谐振网络时,完全并联的 RLC 是最常用的一种电路模型,但是这通常不是最符合实际的一种情况。在实际的电路中,通常是线圈绕制的电感和电容并联。由于绕制电感的线圈中会存在相应的寄生电阻,该电阻通常不可忽视,因此实际的等效电路模型应为理想电感器与一个电阻器串联后,再与电容并联,如图 15 所示。
2.4.1 可谐振性判断与谐振频率
对于这个电路,首先要解决的一个问题是——这个电路是否能够谐振?要解答这个问题,我们就需要列出它的阻抗(或导纳)特性表达式,并确认能够找到一个频率,能够使得阻抗(或导纳)虚部为 0。该电路的输入导纳表达式为:
$$ Y_{IN} = \frac{1}{R + j\omega L} + j\omega C = \frac{R}{(R^2 + \omega^2 L^2)} – j\frac{\omega L}{(R^2 + \omega^2 L^2)} + j\omega C $$令该表达式虚部为零,故有:
$$ \omega C – \frac{\omega L}{(R^2 + \omega^2 L^2)} = 0 $$这是一个二次方程,可以求出它的解为:
$$ \omega_{0} = \frac{1}{\sqrt{LC}}\sqrt{1-\frac{CR^2}{L}} $$由此可知,只有当 $1-\frac{CR^2}{L}>0$,即 $R<\sqrt{\frac{L}{C}}$ 时,谐振频率才是实数,所以当 $R>\sqrt{\frac{L}{C}}$ 时,电路并不会发生谐振。这与我们平时电路设计时的直觉是一致的,只有当电感的串联 R 足够小时,电路才能表现的更接近理想的并联 LC 电路。同时通过表达式也可以看出,当 R 非常小时,整体电路的谐振频率会接近理想 LC 的谐振频率。
2.4.2 常用的简化分析方法
由于我们已经详细分析了并联RLC的特性,所以希望能找到一种办法把上图转化成一个纯并联RLC,即用一个并联的结构来代替 L 与 R 串连的部分,如图 16 所示。
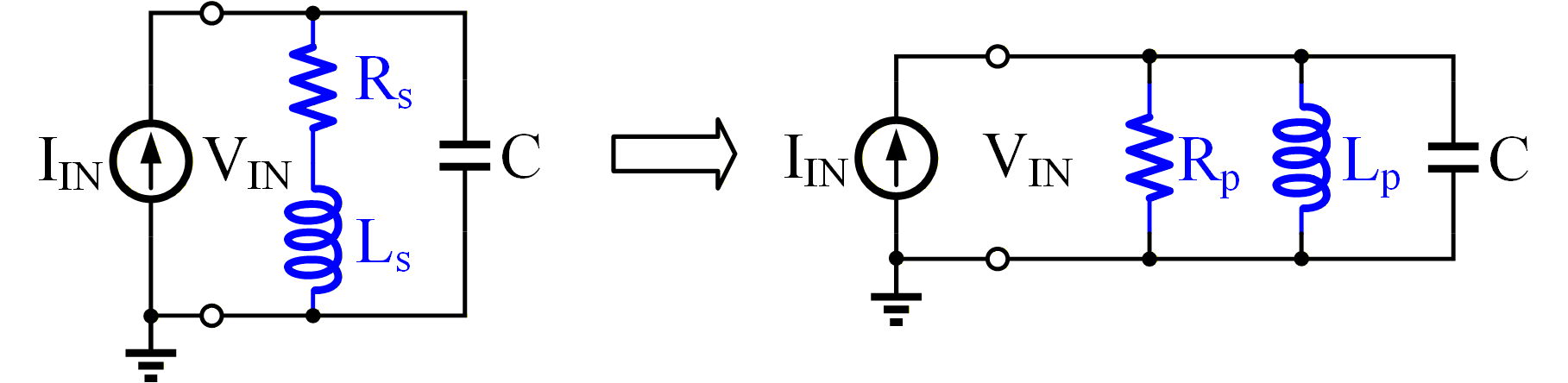
通过令等效后的并联网络中的 $L_p$ 和 $R_p$ 的总阻抗值与原先串联网络中的 L 和 R 的总阻抗值相等,可以列出表达式为:
$$ j\omega_0L_s+R_s=[(j\omega_0L_p)^{-1}+R_p^{-1}]^{-1}=\frac{\left(\omega_0L_p\right)^2R_p+j\omega_0L_pR_p^2}{R_p^2+\left(\omega_0L_p\right)^2} $$令表达式左右两侧的实部和虚部分别相等,并且利用 $Q = \frac{\omega_{0}L_s}{R_s} = \frac{R_p}{\omega_{0}L_p}$ 即可得出:
$$ \begin{aligned} R_p&=R_s(Q^2+1)\\ L_p&=L_s(\frac{Q^2+1}{Q^2}) \end{aligned} $$由此,接下来就可以使用前述 RLC 并联谐振网络的相关内容对该电路进行分析了。不过需要注意的是,这种转换只在以 $\omega_0$ 为中心的一个很窄的频率范围内才成立,同时为了实现较好的等效,通常需要 Q 值较高。不过好在电路设计中的大多数情况都符合该条件,因此是可以使用该转换的(例如 VCO 中的 LC 谐振腔设计就使用了该转换)。当整体电路 Q 值较高时,转换后的电感值与转换之前几乎相同,同时电阻值增大为原来的 $Q^2$ 倍。这是一个非常重要的结论。
2.5 三点法快速分析串并联谐振电路
在讲解 RLC 串并联谐振网络的最后,这里本人将讲述一个实际电路设计中与 RLC 谐振相关的常见情况作为例子,并且介绍一种不需要详细的推导具体的传递函数,就可以快速分析确定 RLC 串并联谐振网络幅频特性的方法——三点分析法(相频特性没什么好介绍的,无非就是谐振点相较于低频产生 90° 相移,远离谐振点的高频又相较于谐振点产生 90° 相移,由低到高整体相移 180°)。
2.5.1 三点分析法介绍
对于一个传递函数的幅频特性分析,通常需要确认整体传递函数是低通、高通,亦或是带通、带阻。对于低通和高通情况,需要确认传递函数是否有 peaking,以及 peaking 值为多大。通常情况下,想要分析传递函数的幅频特性,需要首先准确计算出对应的传递函数,随后计算并绘制出它的幅频特性。这通常要涉及到比较多的计算,十分麻烦,并且并不直观。但是,在我们熟知串并联谐振网络的特性的前提下,对与串并联谐振网络相关的传递函数,这些信息可以通过分析三个点而简单快速的得到,无需进行复杂的计算。这三个点分别是零频率(DC)点、谐振频率点以及无穷大频率点(以下简称高频点)。
对于 0 频率点,此时电容可以看作开路,电感可以看作短路;对于高频点,此时电容可以看作短路,电感可以看作开路;对于谐振频率点,此时分析时谐振频率可以认为是 $1/\sqrt{LC}$,根据谐振时只有实部阻抗(或导纳)计算出网络的电压或者电流特性,再进而对关心的参数进行计算。
经过上面的分析后,可以得到感兴趣的参数的三个计算结果,分别位于 DC 处,谐振频率处以及高频处。根据这三个计算结果的相对大小,就可以大致判断出整体传递函数的状态:
- 如果 DC 处为 0 或一个较小值,高频处也为 0 或一个较小值,只在谐振频率处有一个较大值,则整体传递函数为带通特性。
- 如果 DC 处为一个较大值或者为无穷大,高频处也为一个较大值或者为无穷大,同时谐振频率处有一个较小值,则整体传递函数为带阻特性。
- 如果 DC 处有一定值,谐振频率处也有一定值,同时高频处为 0,则整体传递函数为低通特性。此时如果谐振频率处的值大于 DC 处的值,则表明整体传递函数上存在 peaking。
- 如果 DC 处为 0,但谐振频率处也有一定值,同时高频处也有一定的值,则整体传递函数为高通特性。此时如果谐振频率处的值大于高频处的值,则表明整体传递函数上存在 peaking。
以上四种是最常见的情况。绝大多数与 LC 谐振相关的我们感兴趣的传递函数都会落在这几种情况之中。下面本人将通过一个电路中的设计实例,向大家说明如何使用三点法对实际电路进行分析。
2.5.2 电路设计实例
现在假设这样一种情况,在芯片设计中,我们希望将一个有一定带宽(DC to $f_\text{BW}$)的信号从芯片内的 A 点传输距离到 600um 处的 B 点,随后再从 B 点传输到其他点。在设计这种信号传输电路时,通常需要在 A 点处设计一个 Buffer,同时在 B 处也放一个 Buffer,两个 Buffer 之间使用共面波导结构的走线进行传输。但是在实际中使用 AC 仿真传递函数时就可能会发现,B 点的幅频特性中会存在一个比较尖锐的 peaking,而 A 点的幅频特性中会存在一个凹坑(notch),两峰值位于同一个频率,如图17 所示。这个 peaking 和凹坑的产生原因是什么呢?
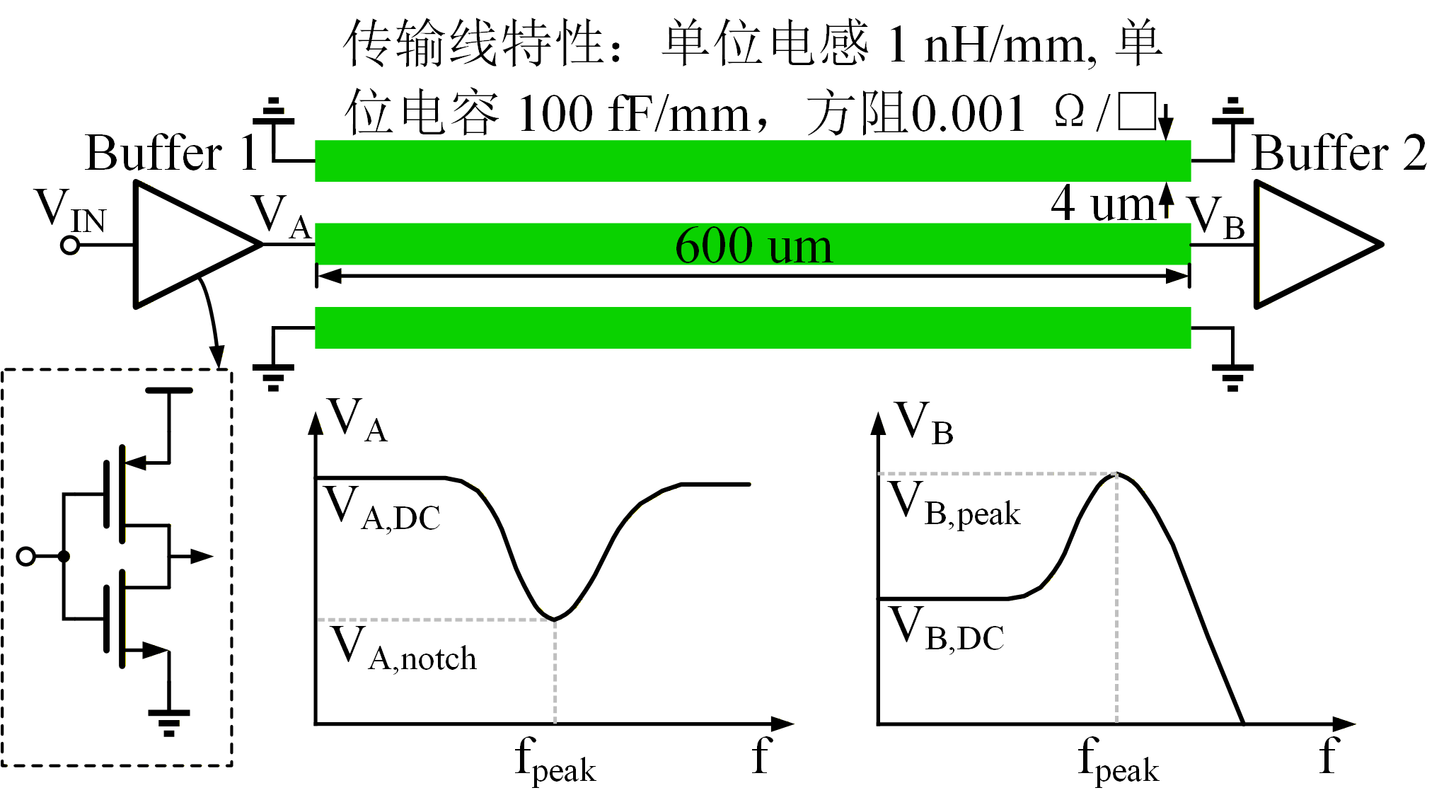
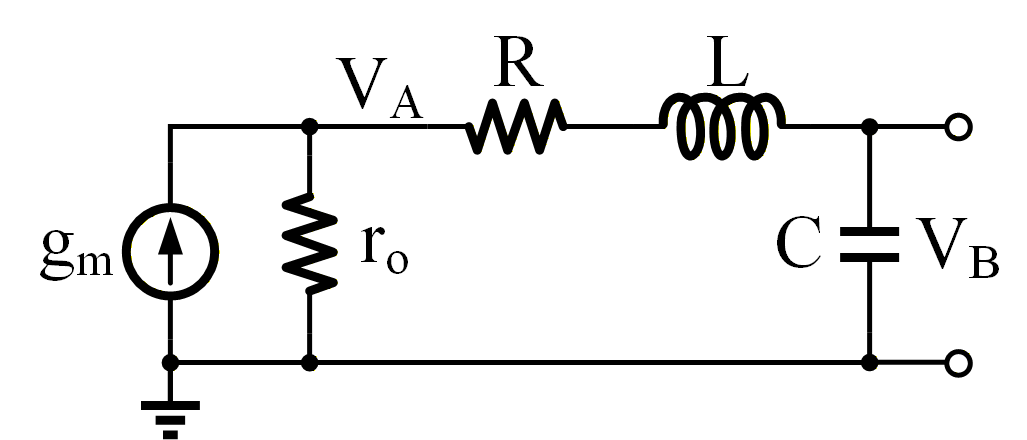
让我们来分析这个问题。A 点到 B 点之间的走线长度为 600um,而通常走线长度达到波长的 1/10 才需要开始考虑传输线效应,对于该问题下,信号频率需要到 50GHz。这在绝大多数设计中都是到不了的,同时仿真发现 peaking 的位置也小于 50GHz,因此该问题可以简化为一个集总参数问题。在集总参数下,走线的模型可以近似为一个串联电阻、一个串联电感和一个对地的电容。根据根据信息可以计算出这段导线的串联电感为 600pH,串联电阻为 0.15Ω,对地电容为 60fF。画出该问题对应的等效电路如图 18 所示。图中 Buffer 使用 $g_m r_o$ 等效电路模型替代。
绘制出该等效电路模型后,结合上文中所描述的 RLC 串联谐振的知识即可判断出,该现象很可能是由于 RLC 谐振导致的。由此即可使用三点法对该传递函数的关键信息进行快速计算。
首先最根本的是要计算出谐振频率。该谐振网络的谐振频率为 $f_0 = \frac{1}{2\pi \sqrt{LC}} = \text{26.5 GHz}$。根据前面的知识,peaking 和 notch 的位置通常和谐振频率非常接近,因此可以近似认为 $f_{peak} = f_0 = \text{26.5 GHz}$。
接下来让我们使用三点法对 A 点进行分析:当频率为 DC 时,电感看作短路,电容看作开路,则此时 A 点的电压值即为 $V_{A,DC} = g_m r_o$;当频率为高频时,电感看作开路,电容看作短路,此时 A 点的电压值同样为 $g_m r_o$。当频率为谐振频率时,此时我们可以认为 RLC 串联谐振网络的阻抗为实部 R,则此时 A 点的电压值为 $V_{A,notch} = g_m (r_o||R)$。考虑到 R 通常远小于 $r_o$,则整体传递函数为带阻特性,存在凹陷点。
让我们继续对 B 点进行分析:当频率为 DC 时,电感看作短路,电容看作开路,则此时 B 点的电压值即为 $V_{B,DC} = g_m r_o$;当频率为高频时,电感看作开路,电容看作短路,此时 B 点的电压值为 0。对于谐振频率点,此时我们可以认为 RLC 串联谐振网络的阻抗为实部 R,则此时串联网络的电流为 R 和 $r_o$ 对 $g_m$ 进行分流。由此得出此时 RLC 串联回路中的电流为 $I_0 = \frac{g_m r_o}{r_o + R}$,进而可以求得电容上的电压 $V_{B,peak} = I_0 \cdot \frac{1}{\omega_0 C} = \frac{g_m r_o}{r_o + R} \sqrt{\frac{L}{C}}$。
可以看出,B 点的整体传递函数呈现低通特性,同时当 R 远小于 $r_o$ 时,电路可能会出现 peaking。带入传输线的具体数据,同时考虑到 $r_o$ 通常较大,可以计算出此时 $V_{B,peak} \approx 10\sqrt{10} \cdot g_m r_o$,传递函数中确实存在 peaking。
在上面的分析过程中,我们没有去计算任何一个具体的传递函数表达式,而是利用对 RLC 谐振网络特性的了解和简单的三点分析就得出了我们感兴趣的传递函数的关键信息。通过这种分析方式可以快速地建立对谐振电路的直觉,加深对谐振电路的理解。
3 二阶系统
讲完了 RLC 串并联谐振网络,接下来来讲一下二阶系统。通常二阶系统会对应一些存在振荡趋势的物理系统,例如一个弹簧加木块组成的系统、一个单摆系统等等,这些系统的特性通常可以使用一个二阶微分方程来描述。二阶系统的官方定义为「可以用二阶微分方程描述的系统」。但是这里我并不使用这个定义,这个定义不够直观,也不够常用,对模拟电路设计上帮助不大。这里本人将重新给出一个更直观的二阶系统判断方式:对于一个传递函数,如果该传递函数的分母为二阶多项式(同时分子最好小于等于二阶),则可以说明该传递函数对应的系统为一个二阶系统。
相信大家很可能在《自动控制原理》或者《信号与系统》之类的书籍上看到过二阶系统的介绍。这些书籍通常从二阶微分方程开始,使用及其复杂的方法推导出二阶系统的时域各种性质;而对于频域性质的介绍则通常是从 Bode 图开始,使用大量公式和计算推导出各种「环节」的 Bode 图的样子,在这时会顺便简单的介绍一下所谓的「二阶震荡环节」。这些方式都过于繁琐,也不够直观,并不便于设计人员对模拟电路设计中出现的各种二阶系统进行理解。下面本章将尽可能使用直观的方式对二阶系统的特性进行专门的介绍,介绍中将会尽量避免繁琐的公式推导,争取用最简单直接的方式带大家了解二阶系统的各种特性。
3.1 二阶系统的标准形式与基本参数
相信大家都在书中看到过用下面的形式表示的二阶系统传递函数:
$$ G(s) = \frac{\omega_n^2}{s^2 + 2\zeta \omega_n s + \omega_n^2} = \frac{1}{1+\frac{2\zeta}{\omega_n} s + \frac{s^2}{\omega_n^2}} $$没错,这确实就是二阶系统最常用的一种标准形式。其中的两个核心参数会主导这个二阶系统的全部特性:
- 自由振荡角频率 $\omega_n$ (Natural Frequency):想象一个没有任何损耗的单摆(例如秋千),在没有损耗存在的情况下,这个单摆会永远按照某个固定的角频率摆动下去。这个固定的角频率就是它的自由震荡频率。在二阶系统中,$\omega_n$ 代表了系统在无阻尼情况下的固有振荡频率。
- 阻尼系数 $\zeta$ (Damping coefficient):这个参数描述了二阶系统中存在的阻尼强弱。$\zeta = 0$ 意味着系统没有阻尼(比如理想单摆),而 $\zeta$ 越大代表阻尼越强,系统振荡过程中损耗越大,能够振荡的时间越短。
除此之外,还有另一种常用的二阶系统传递函数的标准形式:
$$ G(s) = \frac{\omega_n^2}{s^2 + \frac{\omega_n}{Q} s + \omega_n^2} = \frac{1}{1+\frac{s}{\omega_n Q} + \frac{s^2}{\omega_n^2}} $$和前一个表达式不同,这种形式的表达式使用「Q 值」这样一个参数来描述二阶系统的特性。通过简单对比可以看出:
$$ Q = \frac{1}{2\zeta} $$3.2 RLC 谐振网络与二阶系统
上面在描述二阶系统时使用了一些生活中常见的例子,例如弹簧木块、单摆。而二阶系统在电路设计中的实际例子,就是 RLC 谐振网络。众所周知,LC 网络就是一个「存在振荡趋势的物理系统」,同时 R 就可以看作是振荡系统中的阻尼。因此,RLC 谐振网络就是一个非常标准的二阶系统。
从传递函数的表达式中也可以得到这一点。对于上文中提到的 RLC 串联谐振电路,如果考虑电容上的电压值,就可以得到这样一个表达式(这里使用 s 域的表达式):
$$ H(s) = \frac{V_{C}}{V_{IN}} = \frac{\frac{1}{sC}}{R + sL + \frac{1}{sC}} = \frac{1}{s^2LC + sCR + 1} $$该传递函数的分母为二阶多项式,因此整体传递函数表示的系统即为一个二阶系统。将该表达式的分母与前述使用 Q 值来表征二阶系统的特性的标准形式的分母进行对比,可以得出:
$$ \left \{ \begin{aligned} &\omega_n = \frac{1}{\sqrt{LC}} \\ & Q = \frac{\omega_n}{CR} = \frac{1}{R} \cdot \sqrt{\frac{L}{C}} \end{aligned} \right. $$可以看出,标准形式中的 $\omega_n$ 就是上一章中提到的 RLC 谐振频率 $\omega_0$,而标准形式中的 Q 就是 RLC 串联谐振网络的 Q 值表达式。
对于上文中提到的 RLC 并联谐振网络,考虑并联电压值,可以得到这样的表达式:
$$ H(s) = \frac{V_{R}}{I_{IN}} = \frac{1}{\frac{1}{R} + sC + \frac{1}{sL}} = \frac{sL}{s^2LC + s\frac{L}{R} + 1} $$该传递函数的分母同样为二阶多项式,因此整体传递函数表示的系统同样为一个二阶系统。将该表达式的分母与前述使用 Q 值来表征二阶系统的特性的标准形式的分母进行对比,可以得出:
$$ \left \{ \begin{aligned} &\omega_n = \frac{1}{\sqrt{LC}} \\ & Q = \frac{R}{\omega_n L} = R \cdot \sqrt{\frac{C}{L}} \end{aligned} \right. $$与串联谐振网络类似,标准形式中的 $\omega_n$ 同样是上一章中提到的 RLC 谐振频率 $\omega_0$,而标准形式中的 Q 同样是 RLC 并联谐振网络的 Q 值表达式。
由此可见,RLC 串并联谐振网络的相关表达式完全可以转换为二阶系统的标准形式表达式。因此后面将会提到的二阶系统的时域和频域特性也完全适用于 RLC 串并联谐振网络。
3.3 二阶系统的频域特性
提到二阶系统,大家会首先想到什么?是微分方程、正弦振荡的时域波形,还是幅频特性上的 peaking?本人认为,这些都不是二阶系统中最本质的东西。那么二阶系统最本质的东西是什么呢,亦或者说提到二阶系统后大家因该首先想到什么呢?私以为,最本质的东西是—— s 域平面上的两个极点。这两个极点的位置,才是决定二阶系统特性的最核心、最本质的东西。下面本人将使用二阶系统最常见的标准形式(即包含 $\omega_n$ 和 $\zeta$ 这两个参数的形式)对二阶系统的极点和频域特性进行介绍。
3.3.1 二阶系统的极点
二阶系统的分母为一个二阶多项式,通过求根公式和韦达定理能够得到两个根、两根之和以及两根之积为:
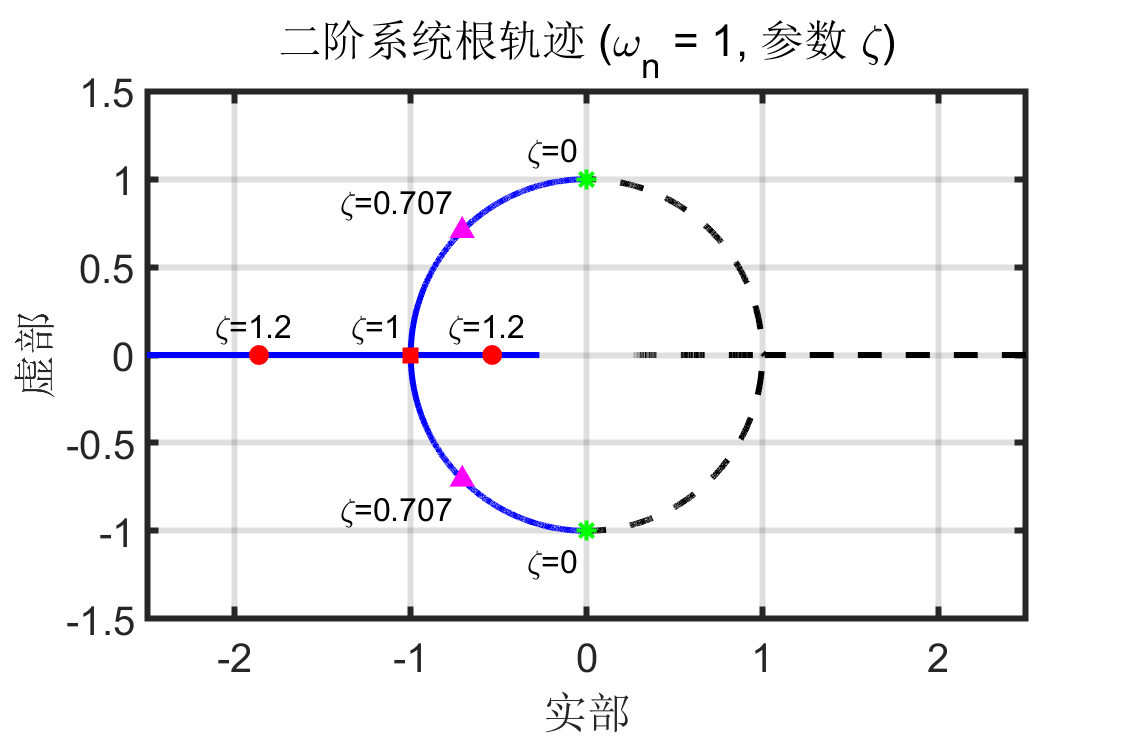
$$ \left \{ \begin{aligned} &\omega_p = -\zeta \omega_n \pm \omega_n \sqrt{\zeta^2 -1} \\ & \omega_{p1} + \omega_{p2} = -2\zeta \omega_n\\ & \omega_{p1} \cdot \omega_{p2} = \omega_n^2 \end{aligned} \right. $$通过求根公式可以得出,当 $\zeta > 1$ 时,系统有两个实极点,位于实轴负半轴,此时被称为过阻尼(over damping)状态;当 $\zeta = 1$ 时,系统有两个相同的实极点,位于实轴负半轴,此时被称为临界阻尼(critical damping)状态;当 $0 < \zeta < 1$ 时,系统有一对位于左半平面的共轭复极点,此时被称为欠阻尼(under damping)状态;当 $\zeta = 0$ 时,极点为虚轴上一对大小相等符号相反的虚数。对于其他情况,系统并不稳定,这里不做讨论。
可以在坐标轴上用图示的方式画出极点随阻尼系数 $\zeta$ 变化的过程,如图 19 所示。随着阻尼系数的减小,系统将从实极点转换为一对共轭复极点,并逐渐向着虚轴靠近。
3.3.2 向量图示法计算传递函数的频率特性
知道一个传递函数表达式的零极点分布后,就可以使用向量图示法非常快速的大致计算出整体传递函数的幅频特性和相频特性了。本节将对向量图示法进行简要的介绍。
考虑一个这样的具有多个零极点的传递函数:
$$ F(s) = \frac{(s+\omega_{z1})(s+\omega_{z2})\cdots}{(s+\omega_{p1})(s+\omega_{p2})\cdots} $$这个传递函数具有多个极点和多个零点,现在我们想要计算它在某个输入频率下的幅频特性和相频特性,直接计算将会非常复杂。但是,如果我们换一种角度去看待这一个传递函数,就能将这样一个复杂的代数计算问题转换为一个简单的几何问题去解决它。
众所周知,s 域平面是一个复数平面,其中的每一个点都是由实部和虚部所构成的。而学过高中数学的同学因该都知道,向量和复数都可以与直角平面坐标系统的点一一对应,因此在复数与平面向量之间可以借助平面坐标系统建立起一一对应:
复数 $z = a + bj$($a, b \in \mathbb{R}$)在复平面上对应坐标为 $(a, b)$ 的点 $Z$,而点 $Z$ 又对应于平面向量 $\overrightarrow{OZ} = (a, b)$,从而复数 $z = a + bj$ 对应于平面向量 $\overrightarrow{OZ} = (a, b)$。有了这些对应,我们可以把复数 $z = a + bj$ 方便地看作是复平面上的点 $Z(a, b)$ 或向量 $\overrightarrow{OZ} = (a, b)$。
有了这个基础后,让我们再看传递函数中的各个因式,这里以 $(s+\omega_{p1})$ 举例。可以简单的将其变换为 $(s-(-\omega_{p1}))$。其中 s 是一个特定的复数,也可以将其看作是一个原点到 s 域平面上某一特定点的向量 $\overrightarrow{s}$;而 $(-\omega_{p1})$ 部分可以看作是一个 $(-\omega_{p1} + 0j)$ 的复数,也可以看作是 s 域上从原点到 $(-\omega_{p1}, 0)$ 的向量 $\overrightarrow{\omega_{p1}}$。因此,$(s-(-\omega_{p1}))$ 这个因式在复平面上所表示的就是向量 $\overrightarrow{s}$ 与向量 $\overrightarrow{\omega_{p1}}$(坐标:$(-\omega_{p1}, 0)$)的差向量,即从 $\overrightarrow{\omega_{p1}}$ 向量指向 $\overrightarrow{s}$ 向量,如图 20 所示。
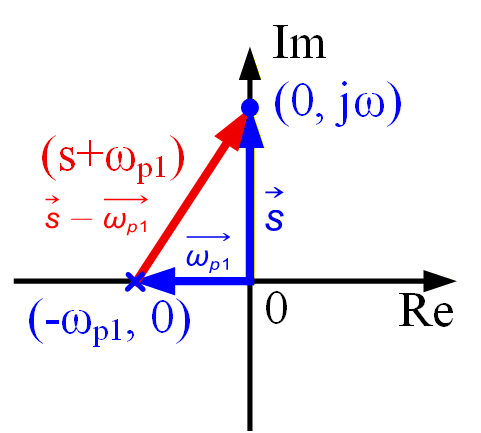
由于幅频特性和相频特性的横坐标均为频率,故在计算幅频特性和相频特性时 s 需要取为 $j\omega$,在 s 平面中对应为 $0 + j\omega$ 的复数,因此计算频率特性时只需要考虑虚轴正半轴即可。由此,上面的复杂传递函数 $F(s)$ 中的各个因式都可以看作是 s 平面上对应的零极点指向虚轴 $(0,j\omega)$ 的一个向量。由此,整体传递函数在某个频率点下的幅频特性可以计算为:
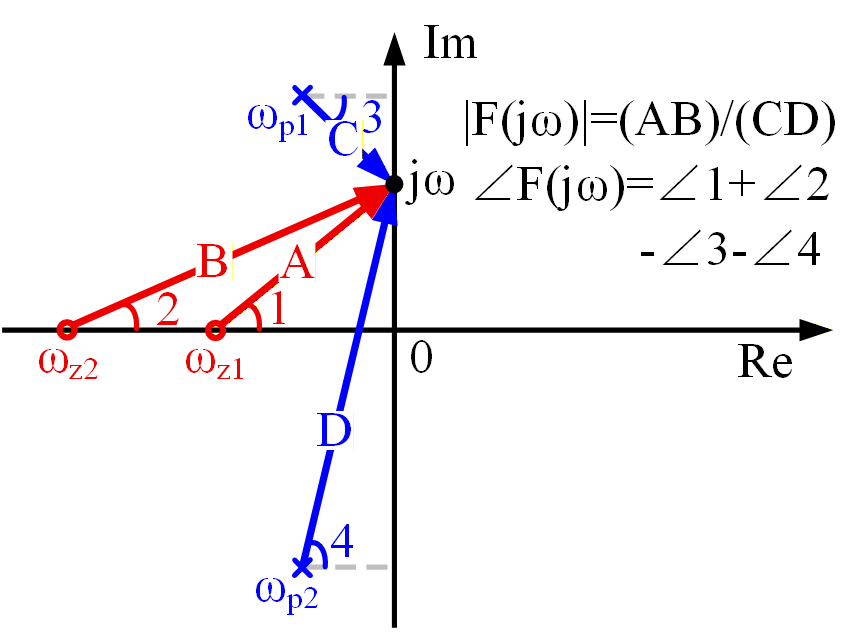
$$ |F(j\omega)| = \frac{|\overrightarrow{(j\omega – (-\omega_{z1}))}|\cdot|\overrightarrow{(j\omega – (-\omega_{z2}))}| \cdots}{|\overrightarrow{(j\omega – (-\omega_{p1}))}|\cdot|\overrightarrow{(j\omega – (-\omega_{p2}))}| \cdots} $$即从零点指向虚轴 $(0,j\omega)$ 点的所有向量的幅值乘积除以从极点指向虚轴 $(0,j\omega)$ 点的所有向量的幅值乘积。对应的,某个频率点下的相频特性可以计算为:
$$ \begin{aligned} \angle F(j\omega) &= \angle \overrightarrow{(j\omega – (-\omega_{z1}))} + \angle \overrightarrow{(j\omega – (-\omega_{z1}))} + \cdots\\ &- \angle \overrightarrow{(j\omega – (-\omega_{p1}))} – \angle \overrightarrow{(j\omega – (-\omega_{p1}))} – \cdots \end{aligned} $$即从零点指向虚轴 $(0,j\omega)$ 点的所有向量与实轴的夹角和减去从极点指向虚轴 $(0,j\omega)$ 点的所有向量与实轴正方向的夹角和。
图 21 展示了一个具有两个零点和两个极点的系统在某个频率点下的幅频特性图示的计算方法。图中 A-D 代表四个向量的模值,$\angle 1-4$ 代表四个向量与实轴的夹角。接下来对二阶系统频率特性的讲解中将会使用向量图示法进行计算。
3.3.3 低通型传递函数
首先来分析具有低通类型传递函数的二阶系统。具有低通类型传递函数的二阶系统是一类非常常见且应用非常广泛的二阶系统。电压源驱动串联谐振网络中电容的电压、二阶低通滤波器等都属于这类二阶系统。低通类型的二阶系统的传递函数标准形式表达式为:
$$ H_{LP}(s) = \frac{\omega_n^2}{s^2 + 2\zeta \omega_n s + \omega_n^2} $$或者用品质因数 $Q$ 的形式等价表示为:
$$ H_{LP}(s) = \frac{\omega_n^2}{s^2 + \frac{\omega_n}{Q} s + \omega_n^2} $$后续的分析将基于使用阻尼系数 $\zeta$ 的表示形式。通过高等数学求极限的知识可知该函数在 $s \to 0$ 时为 1,在 $s \to \infty$ 时其值 $\to 0$。下面将分析不同 $\zeta$ 情况下的幅频特性曲线
(1) $\zeta \geq 1$
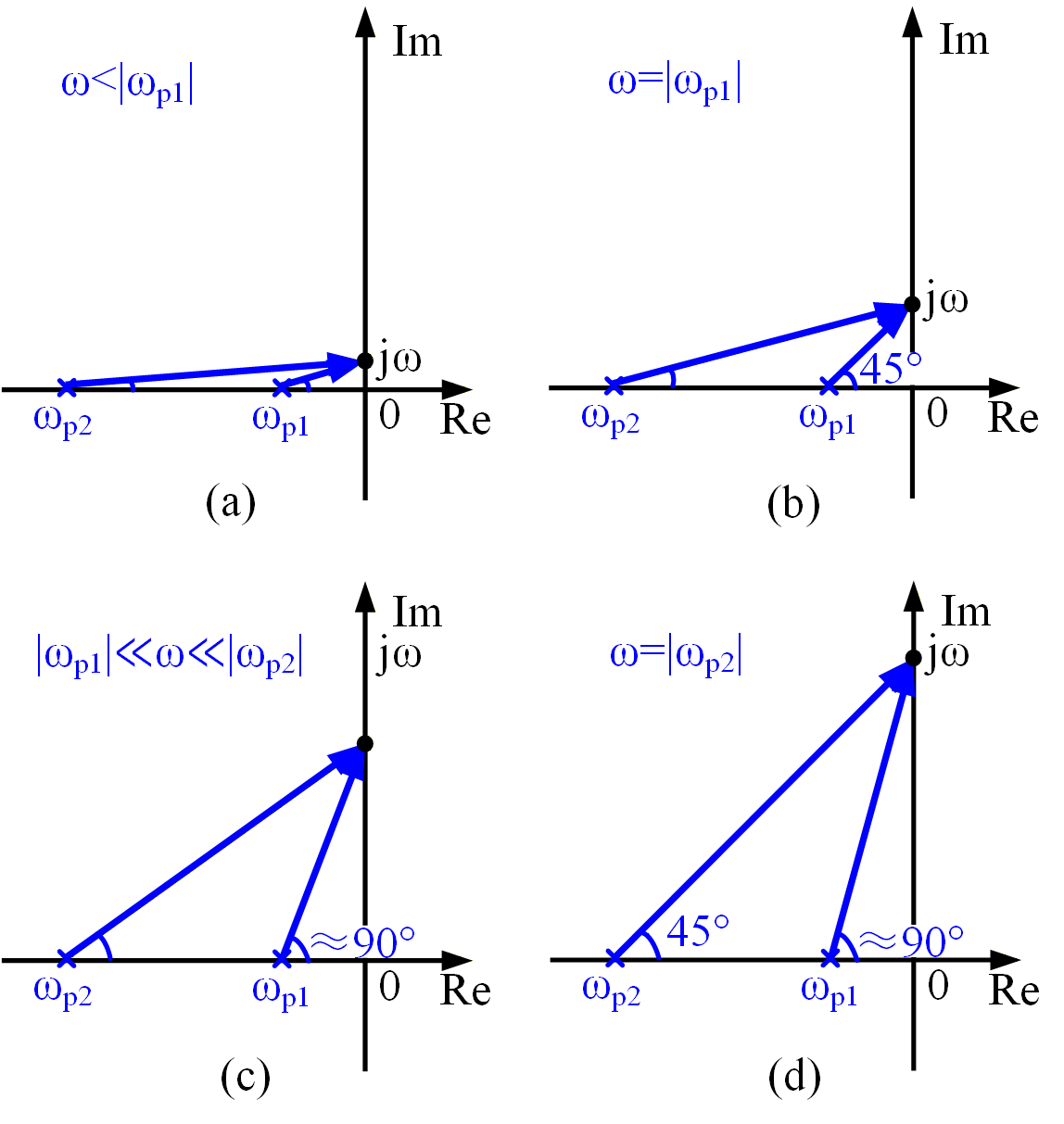
当 $\zeta \geq 1$ 时,此时二阶系统处于过阻尼状态,系统将具有两个位于实轴负半轴上的实极点。这里仅选取 $\zeta \ggg 1$ 这种情况进行分析(此时通常 $\zeta > 100$。该情况通常在两级运放设计以及环路稳定性分析中比较常见,后续的「反馈」文章会对其应用进行详细讲解),其余情况下分析方法和结论与该情况类似。该情况下的向量图如图 22 所示。
由于这种情况下系统的两个极点都位于实轴负半轴上,因此随着频率的升高,$\overrightarrow{(j\omega – (-\omega_{p1}))}$ 和 $\overrightarrow{(j\omega – (-\omega_{p2}))}$ 两个向量的模值都会逐渐变长,这就意味着幅频特性曲线的趋势是随着频率升高逐渐衰减的。
对于相频特性,当 $\omega < |\omega_{p1}|$ 时(如图 22(a) 所示),此时由于 $\omega_{p2}$ 的位置离虚轴较远,极点 $\omega_{p2}$ 几乎没有贡献任何相移。这时全部相移均可看作是由极点 $\omega_{p1}$ 贡献。此时相频特性曲线值 $< 45^\circ$
当 $\omega = |\omega_{p1}|$ 时(如图 22(b) 所示),由于 $\omega_{p2}$ 的位置离虚轴较远,极点 $\omega_{p2}$ 在此时仍然可以近似看作没有贡献相移。此时全部相移均由极点 $\omega_{p1}$ 贡献。而由于 $\omega = \omega_{p1}$,极点 $\omega_{p1}$ 对应的向量 $\overrightarrow{(j\omega – (-\omega_{p1}))}$ 与两坐标轴之间形成一个等腰直角三角形,此时其与实轴的夹角为 $45^\circ$,故此时相频特性曲线的整体相移为 $45^\circ$。
由于$\omega_{p2} \lll \omega_{p1}$ (通常 $\omega_{p2} < 100\omega_{p1}$),随着频率继续升高,必定会存在一个频率区间满足 $|\omega_{p1}| \ll \omega \ll |\omega_{p2}|$ (如图 22(c) 所示)。此时极点 $\omega_{p2}$ 仍然可以看作没有贡献任何相移,而极点 $\omega_{p1}$ 对应的向量 $\overrightarrow{(j\omega – (-\omega_{p1}))}$ 却已经几乎垂直,与横坐标轴的夹角约为 $90^\circ$。故可以认为此时所有相移均由极点 $\omega_{p1}$ 贡献,并且相移为 $90^\circ$。同时,由于两级点相距较远,这段频率区间通常较长,体现在相频特性曲线上即为曲线上会有较长一段的平坦区间。
随着频率进一步升高,极点 $\omega_{p2}$ 也将开始逐渐贡献相移。当频率升高到 $\omega = |\omega_{p2}|$ 时(如图 22(d) 所示),此时极点 $\omega_{p2}$ 所贡献的相移也到达 $45^\circ$,整体相频特性曲线的相移为 $135^\circ$。当频率继续升高,此时极点 $\omega_{p2}$ 对应的向量 $\overrightarrow{(j\omega – (-\omega_{p2}))}$ 也将逐渐趋近于垂直,整体相频特性曲线将逐渐趋近于 $180^\circ$。
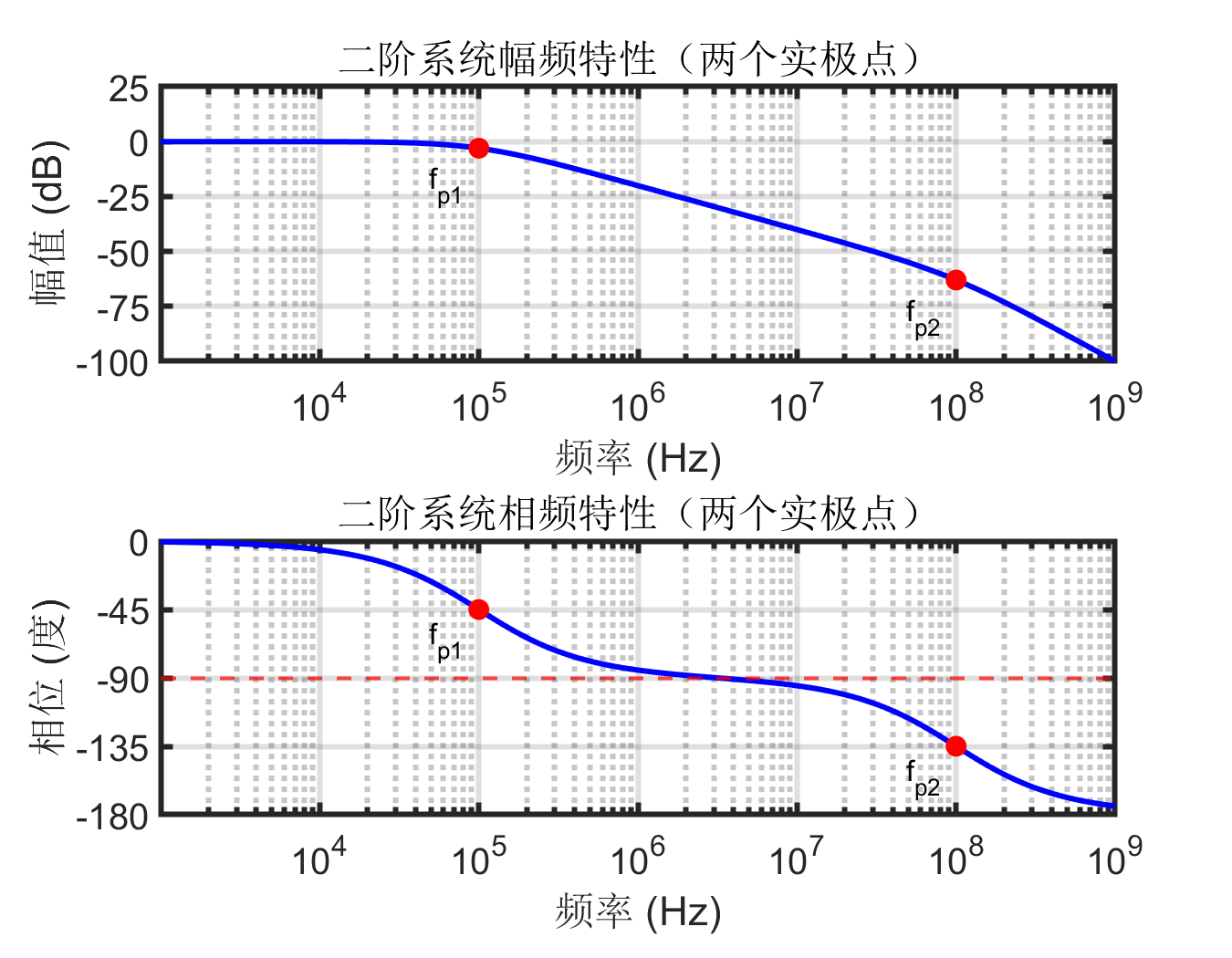
图 23 展示了极点 $\omega_{p1} = 2\pi \cdot 100\text{kHz}$ 且 $\omega_{p2} = 2\pi \cdot 100\text{MHz}$ 时的幅频特性和相频特性曲线。可以明显的看出幅频特性曲线的衰减趋势和相频特性曲线上的 $90^\circ$ 平坦区间。
(2) $\frac{\sqrt{2}}{2} < \zeta < 1$
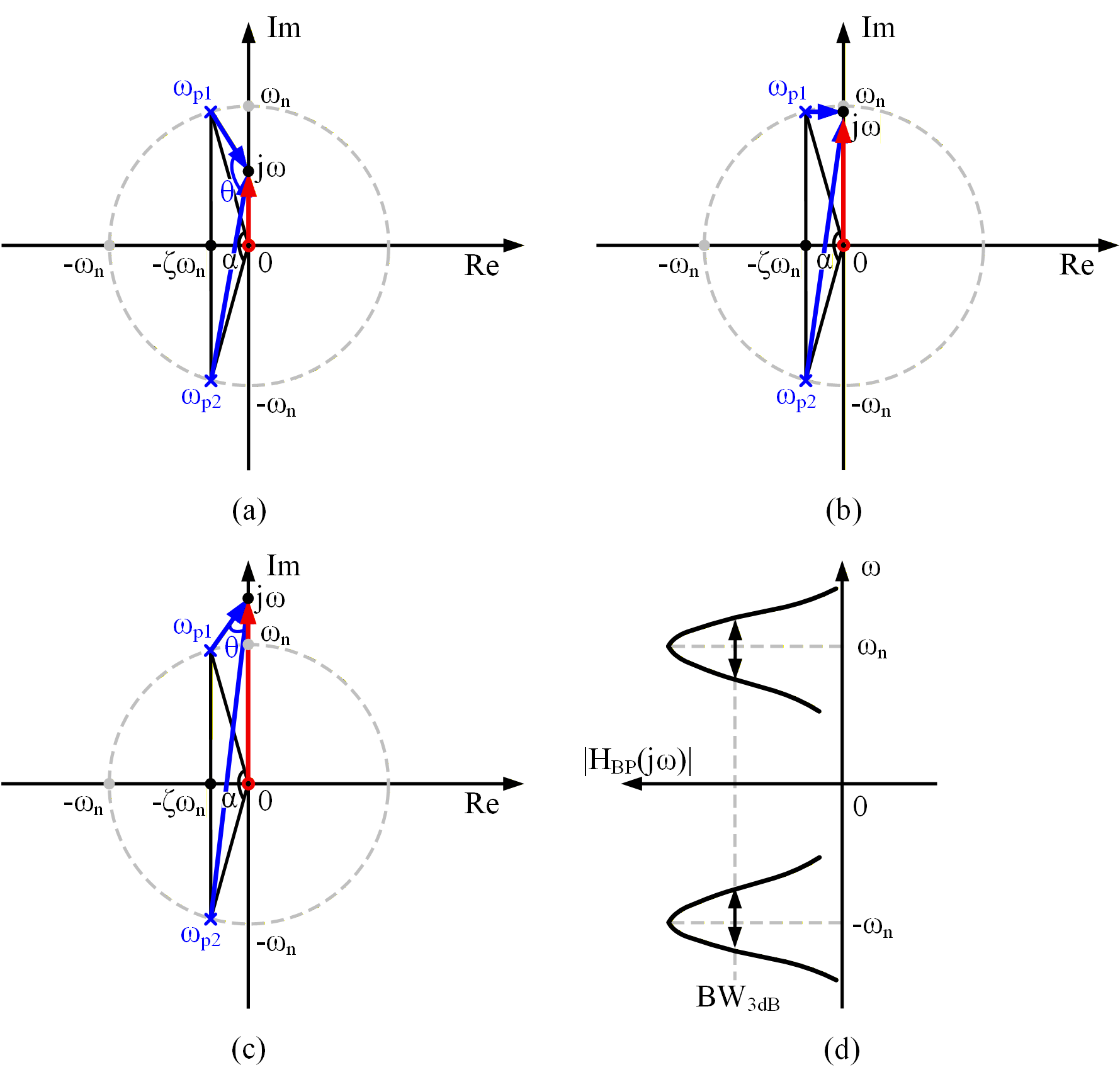
此时二阶系统处于欠阻尼状态,系统将具有一对共轭复极点,如图 24(a) 所示。此时可以在 s 平面上画出两个圆,其中一个圆是根轨迹圆,另一个圆是以两个极点的连线为直径的圆。当 $\frac{\sqrt{2}}{2} < \zeta < 1$ 时,以极点连线为直径的圆的右侧并没有与虚轴相切,而是距离虚轴还有一段距离。当频率为 $\omega$ 时,设极点 $\omega_{p1}$ 对应的向量 $\overrightarrow{(j\omega – (-\omega_{p1}))}$ 的模值为 $a(\omega)$,极点 $\omega_{p2}$ 对应的向量 $\overrightarrow{(j\omega – (-\omega_{p2}))}$ 的模值为 $b(\omega)$,两向量之间的夹角为 $\theta(\omega)$。
当输入频率为 DC 时,两个向量的模值即为从极点到原点之间连线的长度,由于两个极点位于根轨迹圆上,故极点到原点之间连线的长度即为根轨迹圆的半径 $\omega_n$,即 $a(0) = b(0) = \omega_n$。设此时两向量之间的夹角 $\theta(0)=\alpha$。
当输入频率变化时,两个向量的模值 $a(\omega), b(\omega)$(即从极点到目标频率点之间连线的长度)和两个向量之间的夹角 $\theta(\omega)$ 也会相应的产生变化。但是,通过观察可以发现,在输入频率变化时,有一个量是一直不变的——两个极点到目标频率点之间的连线与两级点之间的连线构成的三角形(以下简称为极点-虚轴三角形)的面积(同底等高)。
除了底乘高除以二外,不知道大家是否还记得在高中时学到的三角形的另一个面积公式:
$$ S_{\triangle} = \frac{1}{2}ab\sin{\theta} $$这个公式在这一章节中非常重要,重要到足够为其单开一行。上面我们已经提到,由于同底等高,无论频率如何变化,极点-虚轴三角形的面积是不会变的。由此可以得出:
$$ \begin{aligned} \frac{1}{2}a(0)b(0)\sin{(\theta(0))} &= \frac{1}{2}a(\omega)b(\omega)\sin{(\theta(\omega))}\\ \omega_n^2\sin{\alpha} &= a(\omega)b(\omega)\sin{(\theta(\omega))}\\ \frac{\omega_n^2}{a(\omega)b(\omega)} &= \frac{\sin{(\theta(\omega))}}{\sin{\alpha}} \end{aligned} $$注意上面的第三个表达式的等号左侧。$\omega_n^2$ 即为传递函数 $H_{LP}(j\omega)$ 的分子的模值,而 $a(\omega)b(\omega)$ 正好是 $H_{LP}(j\omega)$ 在输入频率为 $\omega$ 时的分母两个极点所对应的向量的模值乘积。因此,低通传递函数的幅频特性可以计算为:
$$ |H_{LP}(j\omega)| = \frac{\omega_n^2}{a(\omega)b(\omega)} = \frac{\sin{(\theta(\omega))}}{\sin{\alpha}} $$这是一个非常重要的表达式。通过这个表达式,就可以将原来计算模值这样一个复杂的复数代数问题转化为一个简单直观的几何问题,并且转换后的计算公式利用的还是我们非常熟悉的三角函数。
接下来就让我们利用这个公式对 $\frac{\sqrt{2}}{2} < \zeta < 1$ 时的幅频特性进行分析。由于此时以极点连线为直径的圆并没有与虚轴相切,故 DC 频率处两极点与目标频率点的连线之间的夹角 $\theta(0)=\alpha$ 为锐角。而随着频率逐渐升高,夹角 $\theta(\omega)$ 会逐渐减小并趋近于 0,故而 $\sin{(\theta(\omega))}$ 的值也会随着频率的升高逐渐减小并趋近于 0。因此整体低通传递函数的幅频特性会一直呈现出衰减的趋势,如图 24(b) 所示。
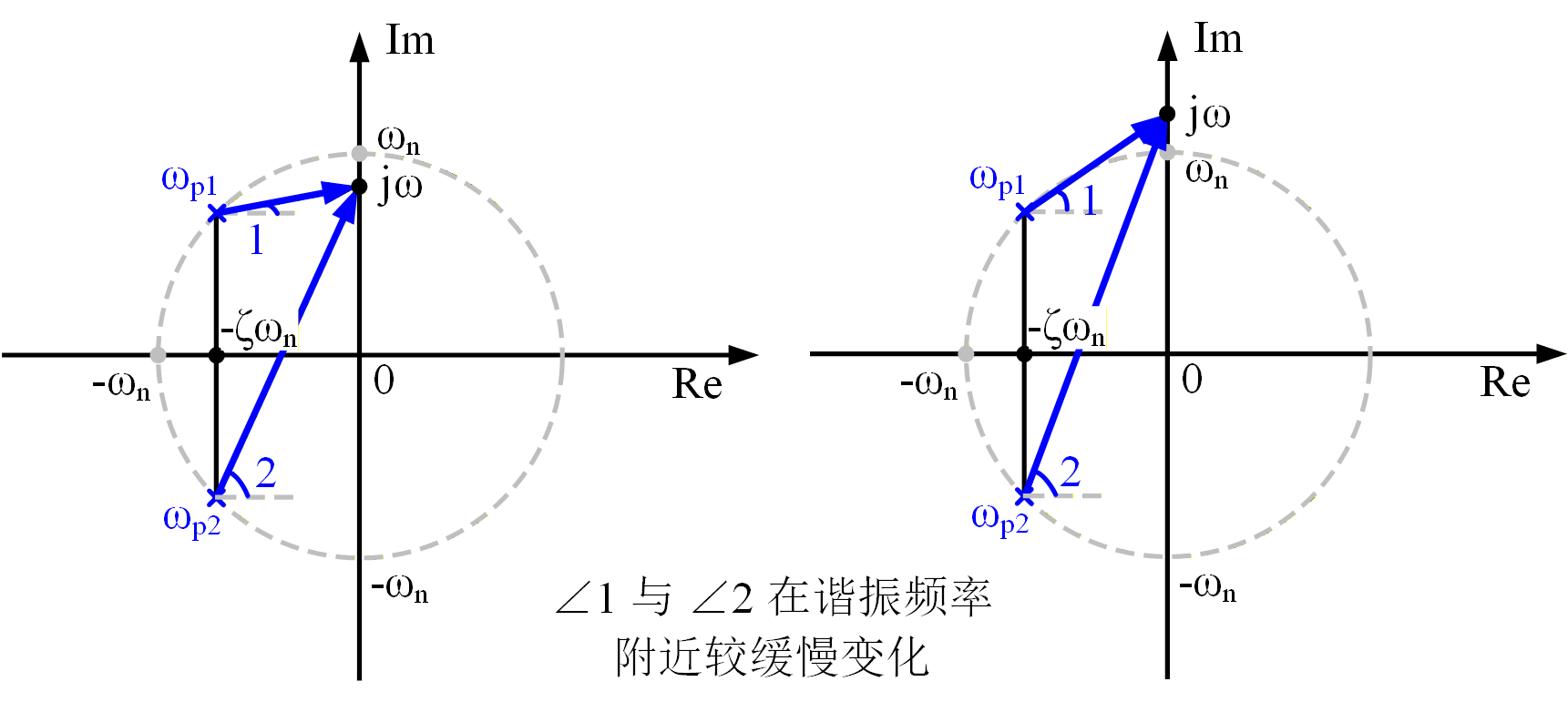
对于相频特性,通过向量图示法可以简单看出,当频率为 0 时相位为 0,当频率趋近无穷时相位会逐渐接近 $180^\circ$。由于极点此时距离虚轴较远,随着频率的升高,两个极点对应的向量与实轴的夹角均会随着频率改变而缓慢变化。因此在这种情况下其相频特性曲线变化会较为缓慢,如图 25 所示。
(3) $ \zeta = \frac{\sqrt{2}}{2}$
当 $ \zeta = \frac{\sqrt{2}}{2}$ 时,以两个极点的连线为直径的圆将刚好与虚轴相切。这意味着 DC 时极点 $\omega_{p1}$ 和 极点 $\omega_{p2}$ 所对应的两个向量之间的夹角为 $90^\circ$(直径所对的圆周角),如图 26(a) 所示。
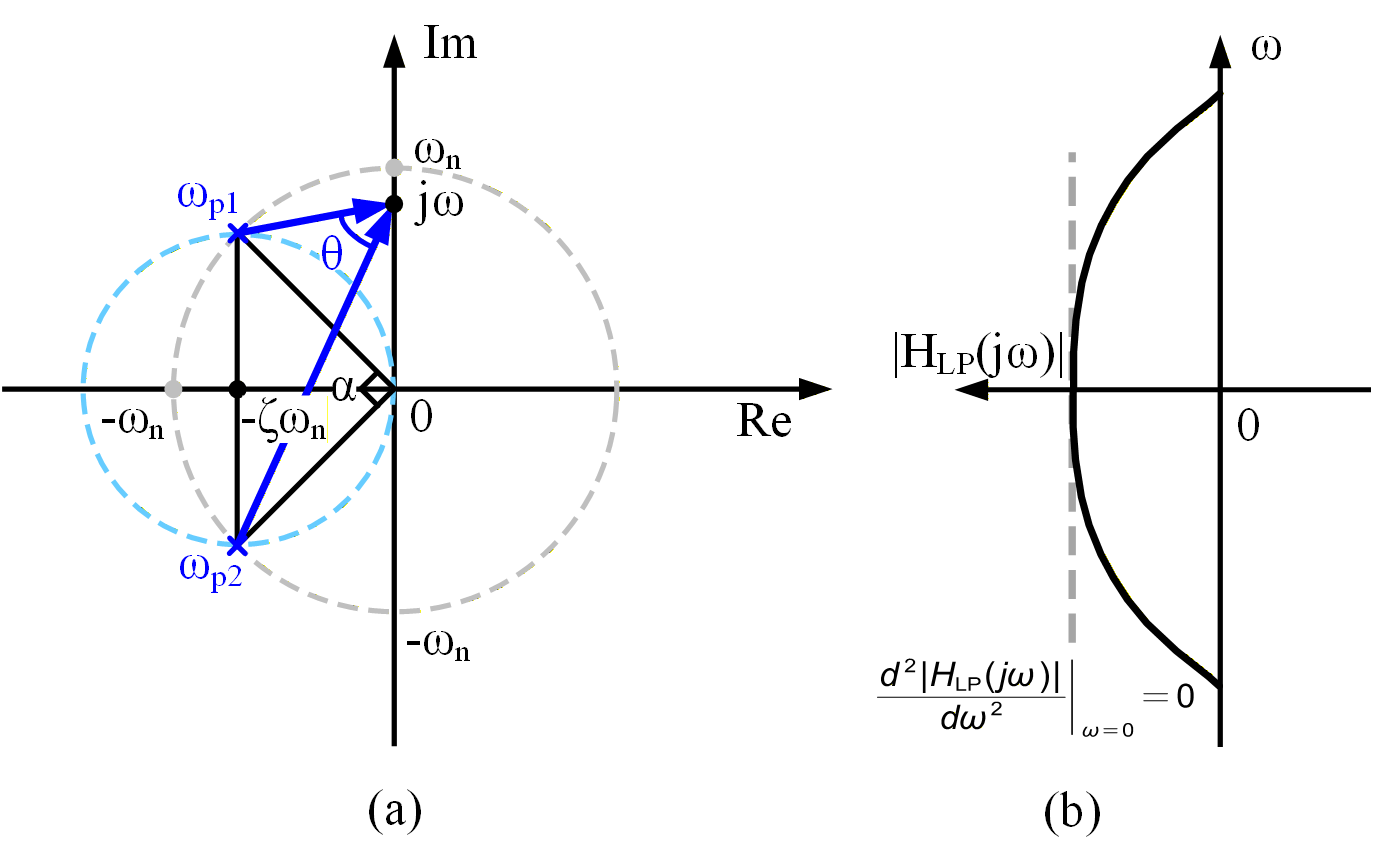
在频率逐渐升高的过程中,极点对应的两个向量之间的夹角 $\theta(\omega)$ 会逐渐减小。由于 $\sin(\theta)$ 在 $\theta$ 从 $90^\circ$ 到 $0^\circ$ 范围内单调递减,因此随着频率升高,夹角变小,整体传递函数的模值仍然会呈现衰减趋势,如图 26(b) 所示。
对于相频特性,通过向量图示法同样可以得出,当频率为 0 时相位为 0,当频率趋近无穷时相位会逐渐接近 $180^\circ$。由于极点此时距离虚轴仍然较远,随着频率的升高时两个极点对应的向量与实轴的夹角随频率缓慢变化。因此在这种情况下其相频特性曲线同样变化较为缓慢,但是比起 $\frac{\sqrt{2}}{2} < \zeta < 1$ 时变化会更快,如图 27 所示。
(4) $ 0 < \zeta < \frac{\sqrt{2}}{2}$
当 $ 0 < \zeta < \frac{\sqrt{2}}{2}$ 时,以两个极点的连线为直径的圆将与虚轴相交。这就意味着 DC 时极点 $\omega_{p1}$ 和 极点 $\omega_{p2}$ 所对应的两个向量之间的夹角为 $>90^\circ$ 的钝角,如图 28(a) 所示。
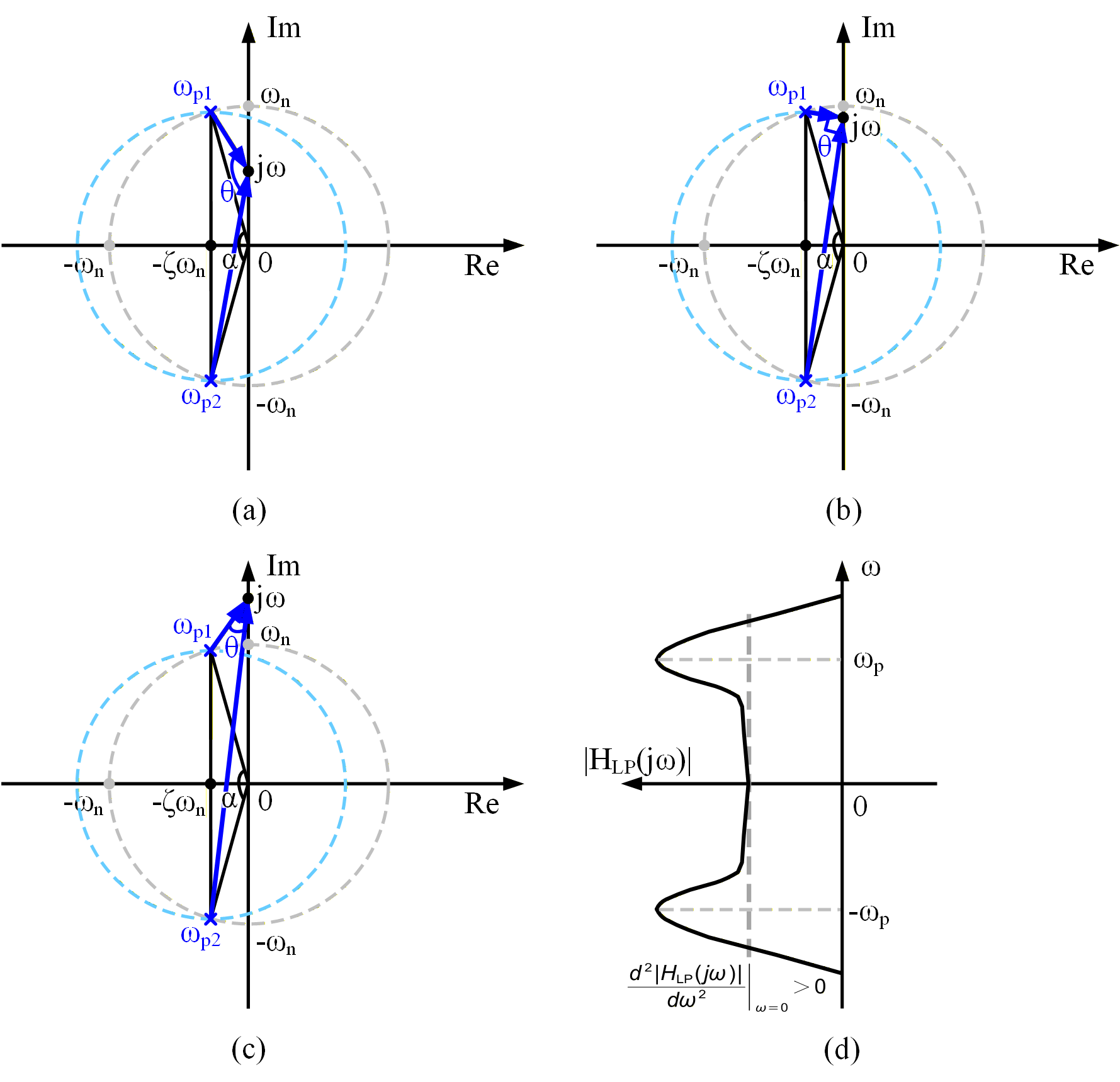
在频率逐渐升高的过程中,极点对应的两个向量之间的夹角 $\theta(\omega)$ 会逐渐减小。这意味着必然存在一个频率点使得夹角 $\theta(\omega)$ 变为直角。这个频率点是非常好确定的,即为以两个极点的连线为直径的圆与虚轴相交的点,如图 28(b) 所示。经过这个频率点后两个向量间的夹角将会变为锐角,并随着频率升高继续减小,如图 28(c) 所示。
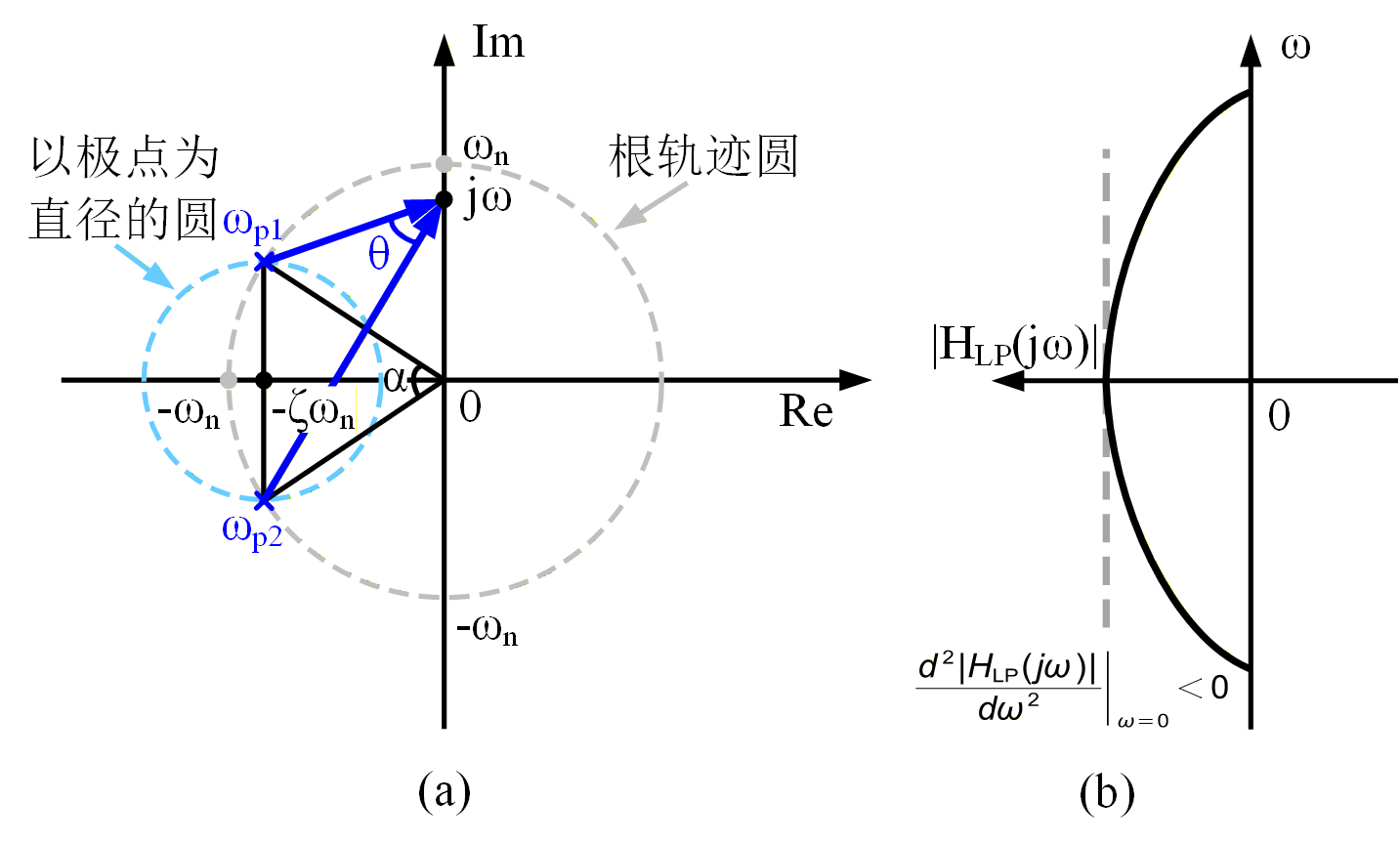
由于 $\sin(\theta)$ 在 $[0, 90^\circ]$ 范围内单调递增,在 $[90^\circ, 180^\circ]$ 范围内单调递减,故整体传递函数幅频特性将在 $\theta(\omega) = 90^\circ$ 时取得峰值,如图 28(d) 所示。使用简单的几何方法即可计算出峰值频率为 $\omega_p = \omega_{n}\sqrt{1-2\zeta^2}$,略小于 $\omega_n$,同时当阻尼系数减小峰值频率会逐渐接近 $\omega_n$。这与前面第 2.2.3 节中图 9 所计算的电容电压峰值点是一致的。
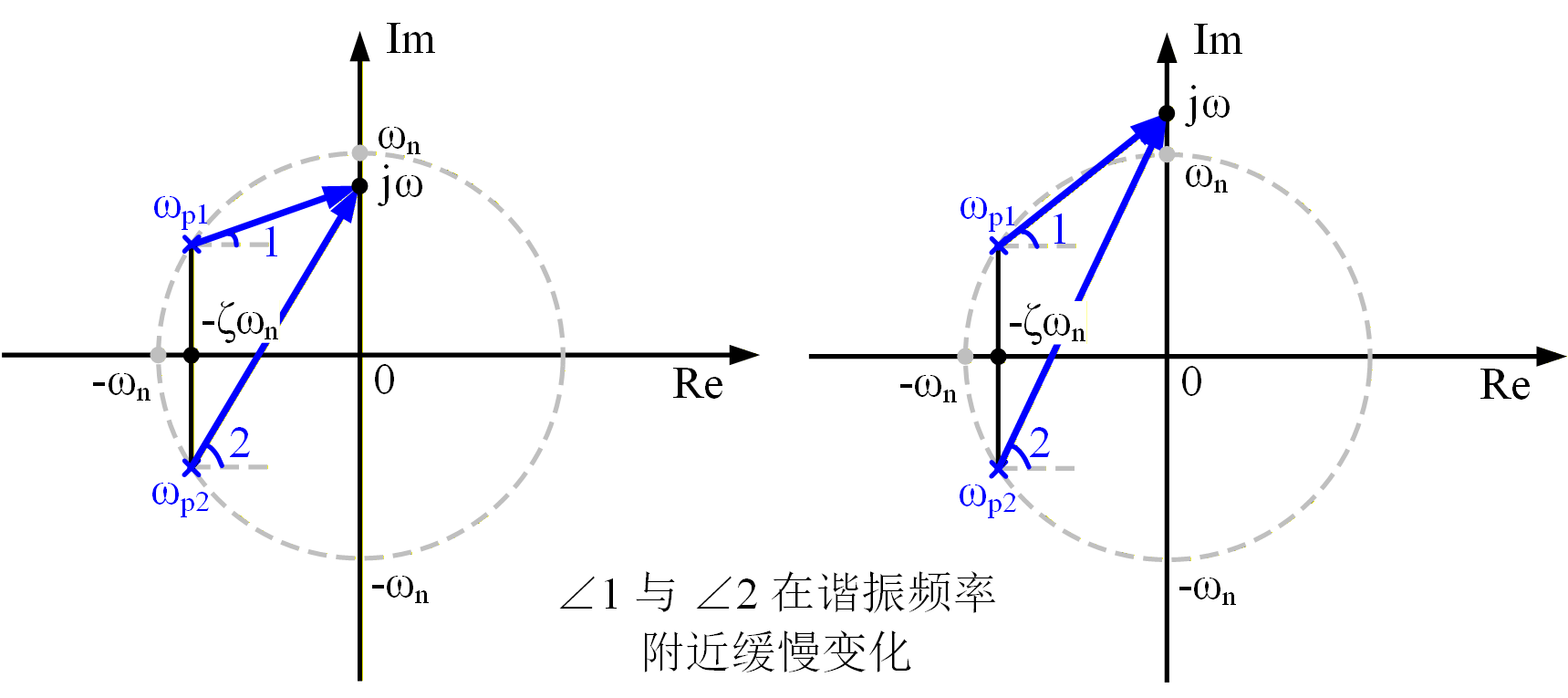
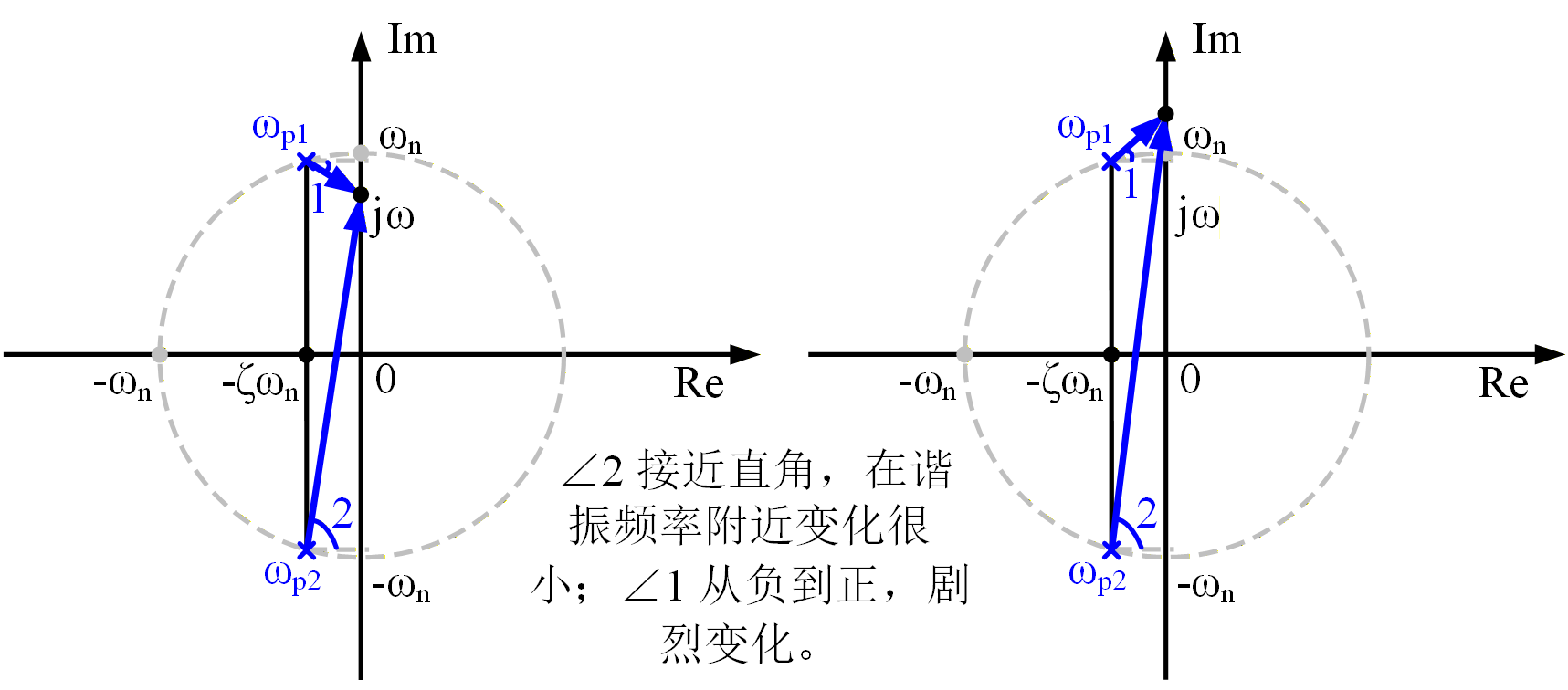
对于相频特性,与前两种情况相同,当频率为 0 时相位为 0,当频率趋近无穷时相位会逐渐接近 $180^\circ$。但是与其他情况不同的是,$ 0 < \zeta < \frac{\sqrt{2}}{2}$ 时极点距离虚轴相对较近,当输入频率在谐振频率附近的一小段区间范围内变化时,第三象限内的极点$\omega_{p2}$ 所对应的向量此时已经接近竖直,故其夹角 $\angle 2$ 在这个小区间范围内所贡献的相移变化较少;而由于极点靠近虚轴,第二象限内的极点$\omega_{p1}$ 所对应的向量在这个小区间内会产生从向下到向上的非常剧烈的变化,造成其夹角 $\angle 1$ 在这个小区间范围内也会产生从负到正的一个剧烈的变化,如图 29 所示。体现在传递函数整体相频特性上就是会在谐振频率附近有一个陡峭的相位变化,并且极点越靠近虚轴($\zeta$ 越小),谐振频率附近相位变化越剧烈。
(5) 低通型传递函数频率特性总结
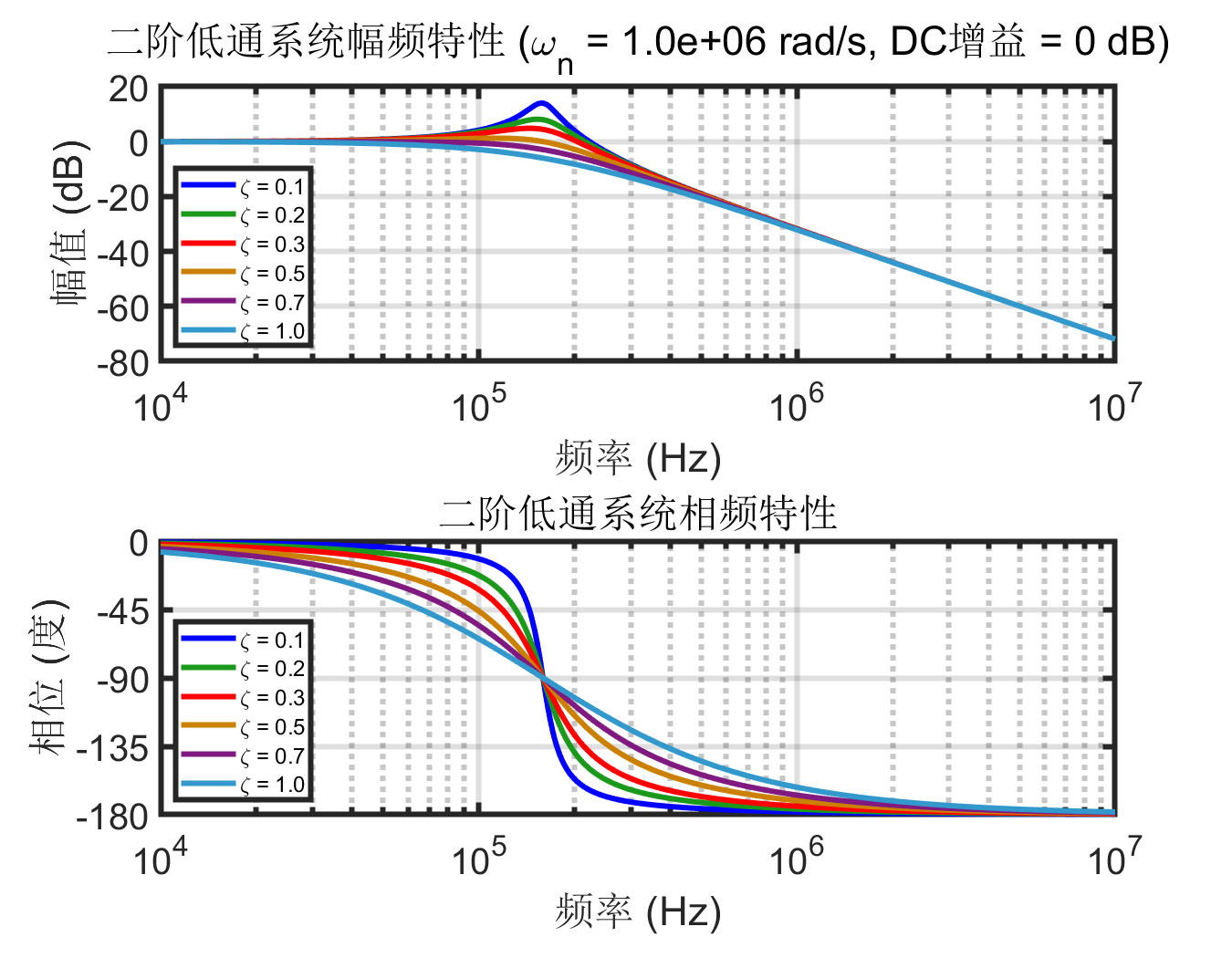
图 30 总结了 $\omega_n$ 相同时,不同 $\zeta$ 下的传递函数幅频特性和相频特性变化。可以看出,与上文中推导出的结论相同,阻尼系数越小,传递函数在 $\omega_n$ 附近的峰值越高,相频特性变化也越剧烈。
3.3.4 带通型传递函数
接下来分析具有带通类型传递函数的二阶系统。带通类型的二阶系统同样也是一类应用非常广泛的二阶系统。电流源驱动并联谐振网络中电阻的电压、LCR 选频网络、二阶带通滤波器等都属于这类二阶系统。带通型二阶系统的传递函数标准形式表达式为:
$$ H_{BP}(s) = \frac{K s}{s^2 + 2\zeta \omega_n s + \omega_n^2} $$或者等价的用品质因数 $Q$ 表示为:
$$ H_{BP}(s) = \frac{K s}{s^2 + \frac{\omega_n}{Q} s + \omega_n^2} $$后续的分析将基于使用阻尼系数 $\zeta$ 的表示形式,同时为了使得幅频特性峰值为 1,这里取 $K = 2\zeta\omega_n$。通过高等数学求极限的知识可知该函数在 $s \to 0$ 时为 0,在 $s \to \infty$ 时其值 $\to 0$,在 $s=j\omega_n$ 时为 1,为带通特性。由于带通系统通常用于选频、滤波等等,这些情况通常要求其带宽要较窄,这就意味着需要有一个较低的 $\zeta$。因此,在分析带通传递函数时,将只对 $0 < \zeta < \frac{\sqrt{2}}{2}$ 的情况进行分析。
与低通表达式相比,带通表达式增加了一个位于原点的零点,因此在使用向量图示法分析时需要增加一个从原点指向目标频率点的向量,如图 31(a) 所示。故而在输入频率为 $\omega$ 时传递函数的模值即为原点指向目标频率点的向量的模值除以的分母两个极点所对应的向量的模值乘积。因此,低通传递函数的幅频特性可以用图示法计算为:
$$ |H_{BP}(j\omega)| \propto \frac{\omega}{a(\omega)b(\omega)} \propto \frac{\omega\sin{(\theta(\omega))}}{\sin{\alpha}} $$可以看出带通情况下其幅值将正比于 $\omega\sin{\theta}$。由于函数 $y=x\sin{x}$ 的极值点并不位于 $x=\frac{\pi}{2}$,而是略大于 $\frac{\pi}{2}$,因此带通型传递函数的极值点也不会出现在 $\theta(\omega) = 90^\circ$ 的地方(即不会出现在 $\omega_p = \omega_{n}\sqrt{1-2\zeta^2}$),而是会出现在一个略大于 $\omega_p$ 的频率。事实上可以从代数上证明,这个略大于的频率正是 $\omega_n$。
可以从向量图示法中简单分析出传递函数的趋势。当频率为 DC 是,由于零点所对应的向量模值为 0,因此整体带通传递函数的幅频特性曲线值为 0。随着频率逐渐升高,如图 31(a) 所示,零点所对应的向量的模值逐渐增加,同时极点所对应的向量的模值为一增一减趋势,整体乘积会变小,这会导致幅频特性曲线值逐渐抬升。
当 $\omega_{p1}$ 所对应的向量垂直于虚轴时(此时输入频率接近 $\omega_{n}$),此时$\omega_{p1}$ 所对应的向量模值达到最小,这意味着整体传递函数在该频率附近会存在一个最大值。
随着频率继续升高并超过 $\omega_{n}$ 后,$\omega_{p1}$ 和 $\omega_{p2}$ 所对应的向量的模值都开始增长,如图 31(c) 所示。这意味着输入频率超过 $\omega_{n}$ 后,整体传递函数分母的两项都是随频率增加,故分母随频率的变化为平方关系。相比于分子的线性关系,分母的平方关系增长更快,故最终传递函数在高频处仍然会趋近于 0。通过代数法可以证明整体传递函数的 3dB 带宽为:
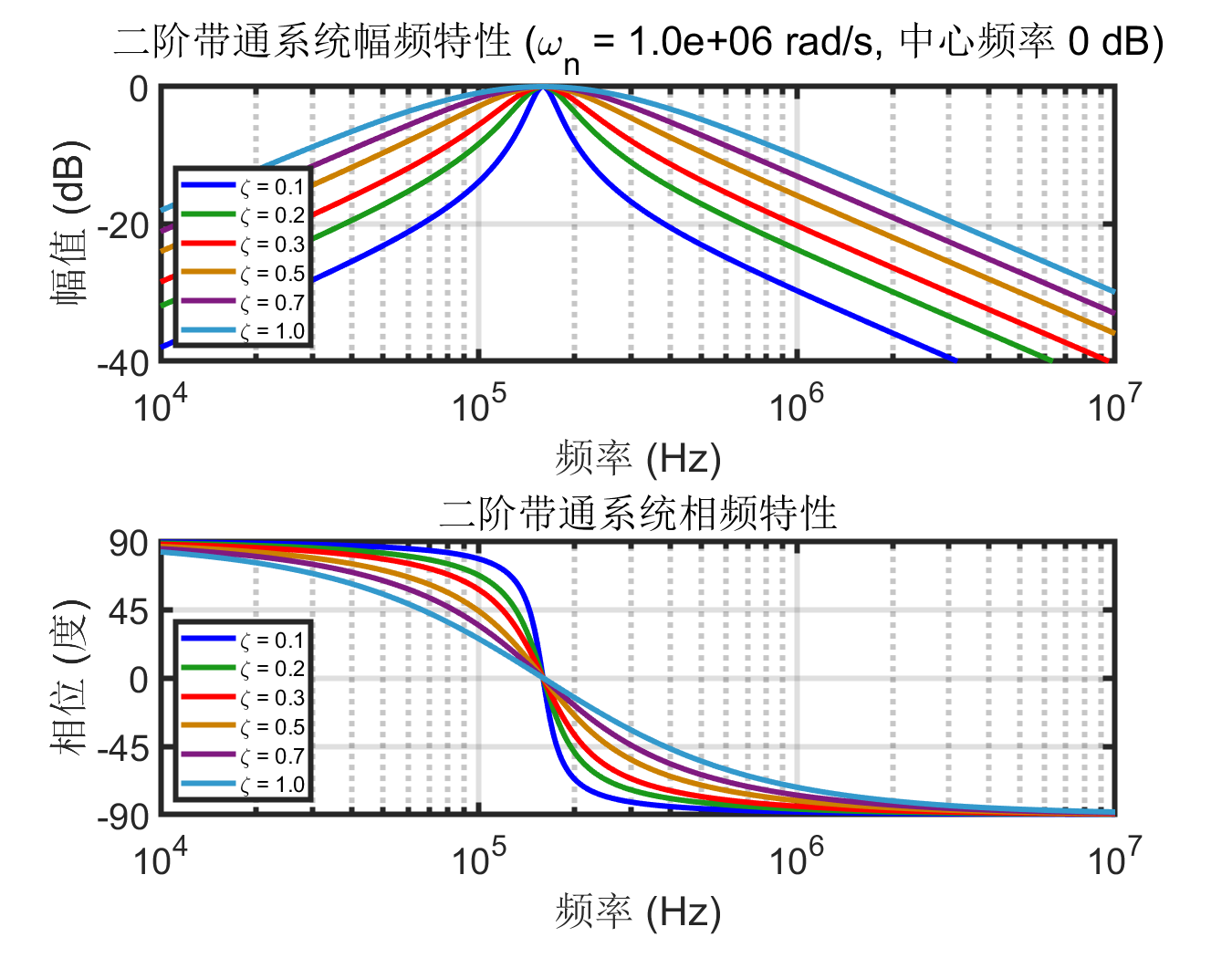
$$ BW \approx 2\zeta\omega_n = \frac{\omega_n}{Q} $$对于带通传递函数的相频特性,可以直接看出:相较于低通网络,带通网络相频特性的变化趋势相同,只是增加的零点提供了一个 $90^\circ$ 的固定相移罢了,故这里不做详细分析。图 32 总结了 $\omega_n$ 相同时,不同 $\zeta$ 下的传递函数幅频特性和相频特性变化。
3.4 二阶系统的时域特性
对于二阶系统的时域特性,这里主要指的是二阶系统的冲激响应 (impulse responce) 或者阶跃响应 (Step response)。在对时域特性进行分析时,同样会分为低通型传递函数和带通型传递函数两种,通常低通系统更关注其阶跃响应,带通系统更关注其冲击响应。由于当系统处于过阻尼时,其时域特性会退化为与一阶系统类似,而当系统处于欠阻尼时会产生振荡,故而在二阶系统设计中,通常最关心欠阻尼时的时域特性。本文中将主要会对欠阻尼情况下的时域特性进行分析。
时域响应通常难以像频域响应一样有上一节的那种较为简洁直观的分析方法,因此这个章节中将不可避免地出现大量的表达式。为了尽可能减少大家的理解负担,本人会尽可能选择较为容易理解的方式对时域响应表达式进行推导。由于绝大多数电路设计人员都是从传递函数角度出发去理解二阶系统,因此这里也从传递函数和拉普拉斯饭变换角度去求解二阶系统的时域特性。
为了简化后续的计算,在进行下面的讲解前,这里先展示一些后续计算中会用到的部分分式展开结果。利用这些部分分式展开结果,可以在不使用待定系数法的情况下,快速的求出二阶系统传函相关的多项式的部分分式展开结果。
$$ \left \{ \begin{aligned} \frac{1}{(s-s_1)(s-s_2)} & = \frac{1}{s_1 – s_2}\left( \frac{1}{s-s_1} – \frac{1}{s-s_2} \right)\\ \frac{s}{(s-s_1)(s-s_2)} & = \frac{1}{s_1 – s_2}\left( \frac{s_1}{s-s_1} – \frac{s_2}{s-s_2} \right) \end{aligned} \right. $$3.4.1 低通型传递函数
对于低通型传递函数的时域响应的典型例子为一个 RLC 串联谐振网络在输入电压源驱动下的电容电压响应,如图 33 所示。
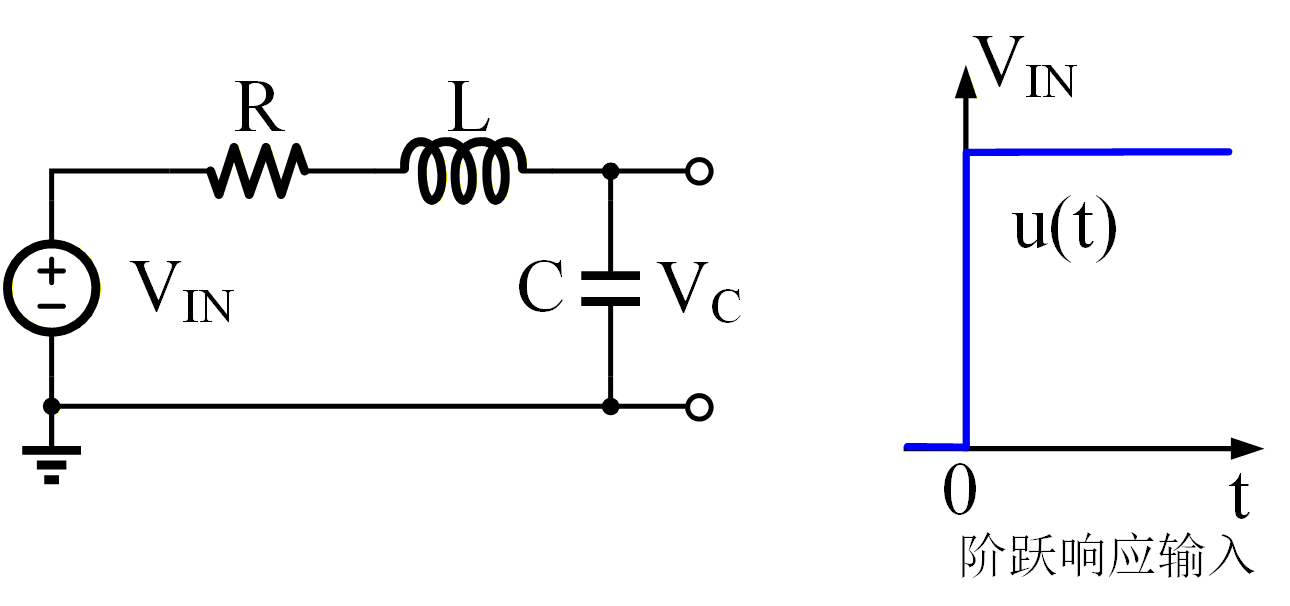
我们仍然在上文所述的标准低通型传递函数的基础上进行时域响应的推导。系统在单位阶跃输入后的输出的拉普拉斯变换表达式为:
$$ \begin{aligned} Y(s) &= \mathcal{L}\{u(t)\} \cdot H_{LP}(s)\\ &= \frac{1}{s} \cdot \frac{\omega_n^2}{s^2 + 2\zeta \omega_n s + \omega_n^2}\\ &= \frac{1}{s} \cdot \frac{\omega_n^2}{(s-\omega_{p1})(s-\omega_{p2})} \end{aligned} $$对于 $\frac{\omega_n^2}{(s-\omega_{p1})(s-\omega_{p2})}$ 表达式利用上文中提到的部分分式展开表达式,并取 $s_1 = \omega_{p1}$, $s_2 = \omega_{p2}$ 后可以将其拆分为:
$$ \begin{aligned} Y(s) &= \frac{1}{s} \cdot \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \left( \frac{1}{s-\omega_{p1}} – \frac{1}{s-\omega_{p2}} \right)\\ &= \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \left( \frac{1}{s(s-\omega_{p1})} – \frac{1}{s(s-\omega_{p2})} \right) \end{aligned} $$继续对 $\frac{1}{s(s-\omega_p)}$ 利用上面的部分分式展开表达式,并取 $s_1 = \omega_{p}$, $s_2 = 0$ 后可以将其继续拆分为:
$$ Y(s) = \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \left[ \frac{1}{\omega_{p1}}\left( \frac{1}{s-\omega_{p1}} – \frac{1}{s} \right) – \frac{1}{\omega_{p2}}\left( \frac{1}{s-\omega_{p2}} – \frac{1}{s} \right) \right] $$接下来让我们展开括号并合并 $\frac{1}{s}$ 相关项:
$$ Y(s) = \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \left( \frac{1}{\omega_{p1}}\frac{1}{s-\omega_{p1}} – \frac{1}{\omega_{p1}}\frac{1}{s} – \frac{1}{\omega_{p2}}\frac{1}{s-\omega_{p2}} + \frac{1}{\omega_{p2}}\frac{1}{s} \right) $$将 $1/s$ 的项放在一起:
$$ \frac{1}{s} \left( -\frac{1}{\omega_{p1}} + \frac{1}{\omega_{p2}} \right) = \frac{1}{s} \cdot \frac{-\omega_{p2} + \omega_{p1}}{\omega_{p1}\omega_{p2}} = \frac{1}{s} \cdot \frac{\omega_{p1}-\omega_{p2}}{\omega_{p1}\omega_{p2}} $$乘以系数 $\frac{\omega_n^2}{\omega_{p1}-\omega_{p2}}$ 后,得到:
$$ \frac{1}{s} \cdot \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \cdot \frac{\omega_{p1}-\omega_{p2}}{\omega_{p1}\omega_{p2}} = \frac{1}{s} \cdot \frac{\omega_n^2}{\omega_{p1}\omega_{p2}} $$注意到上面提到的极点两根之积 $\omega_{p1}\omega_{p2} = \omega_n^2$,所以此项可以简化为 $\frac{1}{s}$。接下来让我们对剩余项进行处理。剩下不含 $1/s$ 的项为:
$$ \frac{\omega_n^2}{\omega_{p1}-\omega_{p2}} \left( \frac{1}{\omega_{p1}} \cdot \frac{1}{s-\omega_{p1}} – \frac{1}{\omega_{p2}} \cdot \frac{1}{s-\omega_{p2}} \right) $$代入 $\omega_n^2 = \omega_{p1}\omega_{p2}$:
$$ \begin{aligned} &= \frac{\omega_{p1}\omega_{p2}}{\omega_{p1}-\omega_{p2}} \left( \frac{1}{\omega_{p1}} \cdot \frac{1}{s-\omega_{p1}} – \frac{1}{\omega_{p2}} \cdot \frac{1}{s-\omega_{p2}} \right)\\ &= \frac{\omega_{p2}}{\omega_{p1}-\omega_{p2}} \cdot \frac{1}{s-\omega_{p1}} – \frac{\omega_{p1}}{\omega_{p1}-\omega_{p2}} \cdot \frac{1}{s-\omega_{p2}} \end{aligned} $$综合后可得:
$$ Y(s) = \frac{1}{s} + \frac{\omega_{p2}}{\omega_{p1}-\omega_{p2}} \cdot \frac{1}{s-\omega_{p1}} – \frac{\omega_{p1}}{\omega_{p1}-\omega_{p2}} \cdot \frac{1}{s-\omega_{p2}} $$由此,我们成功对阶跃响应输出的拉普拉斯变换表达式进行了部分分式分解。接下来需要通过查询单边拉普拉斯反变换表,即可得到输出的时域表达式。进行拉普拉斯反变换,可以得到到单位阶跃响应:
$$ y(t) = 1 + \frac{\omega_{p2}}{\omega_{p1}-\omega_{p2}} e^{\omega_{p1}t} – \frac{\omega_{p1}}{\omega_{p1}-\omega_{p2}} e^{\omega_{p2}t}, \quad t \ge 0 $$其中 $\omega_{p1}$ 和 $\omega_{p2}$ 是特征方程 $s^2+2\zeta\omega_n s+\omega_n^2=0$ 的根:
$$ \omega_{p1,2} = -\zeta\omega_n \pm \omega_n\sqrt{\zeta^2-1} $$得到了具体的时域表达式后,接下来就可以根据阻尼系数的值进行分别讨论。
(1) 过阻尼情况($\zeta > 1$)
此时 \(\sqrt{\zeta^2-1} > 0\),两个极点均为负实数,且 \(\omega_{p1} \neq \omega_{p2}\)。因此最终的时域输出表达式可以表示为:
$$ y(t) = 1 + \frac{1}{\omega_{p1}-\omega_{p2}} \left[\omega_{p2}e^{\omega_{p1}t} – \omega_{p1}e^{\omega_{p2}t}\right], \quad t \ge 0 $$由于 $\omega_{p2} < \omega_{p1} < 0$,因此整体函数体现为一个单调上升的趋势,并不会有阻尼和振荡等情况产生。当两个极点距离较远时,$e^{\omega_{p2}t}$ 所对应的项由于指数值较大,会迅速衰减到 0。整体的上升速度将由较大的极点(靠近原点的 $\omega_{p1}$)主导,可以近似认为整体系统退化为一个单极点的一阶系统。
(2) 临界阻尼情况($\zeta = 1$)
此时 $\sqrt{\zeta^2-1}=0$,两根相等:$\omega_{p1}=\omega_{p2}=-\omega_n$。上述分解式因分母为零失效,需单独处理。直接对
$$ Y(s) = \frac{\omega_n^2}{s(s+\omega_n)^2} $$进行部分分式分解(由于这种情况应用不多,这里不做单独推导,仅直接给出结论):
$$ Y(s) = \frac{1}{s} – \frac{1}{s+\omega_n} – \frac{\omega_n}{(s+\omega_n)^2} $$反变换得:
$$ y(t) = 1 – e^{-\omega_n t} – \omega_n t e^{-\omega_n t} = 1 – e^{-\omega_n t}(1+\omega_n t), \quad t \ge 0 $$可以看出整体函数仍然为一个单调上升趋势,其上升速度比过阻尼情况较快。
(3) 欠阻尼情况($0 < \zeta < 1$)
此时 $\sqrt{\zeta^2-1} = j\sqrt{1-\zeta^2}$,极点为共轭复数:
$$ \omega_{p1} = -\sigma + j\omega_d,\quad \omega_{p2} = -\sigma – j\omega_d $$其中
$$ \sigma = \zeta\omega_n,\quad \omega_d = \omega_n\sqrt{1-\zeta^2} > 0 $$将其带入时域表达式可得:
$$ y(t) = 1 + \frac{1}{\omega_{p1}-\omega_{p2}} \left[\omega_{p2}e^{\omega_{p1}t} – \omega_{p1}e^{\omega_{p2}t}\right], \quad t \ge 0 $$代入 $\omega_1 = -\sigma + j\omega_d$,$\omega_2 = -\sigma – j\omega_d$,$\omega_1-\omega_2 = 2j\omega_d$:
$$ \begin{aligned} y(t)&=1+ \frac{1}{2j\omega_{d}}\left[(-\sigma + j\omega_{d})e^{(-\sigma – j\omega_{d})t} – (-\sigma – j\omega_{d})e^{(-\sigma + j\omega_{d})t} \right]\\ &= 1+ \frac{1}{2j\omega_{d}}e^{-\sigma}\left[(-\sigma – j\omega_{d})e^{j\omega_{d}t} – (-\sigma + j\omega_{d})e^{ -j\omega_{d}t}\right]\\ &= 1+ \frac{1}{2j\omega_{d}}e^{-\sigma t}\left[ \sigma(e^{-j\omega_d t}-e^{j\omega_d t}) – j\omega_d(e^{j\omega_d t}+e^{-j\omega_d t}) \right]\\ \end{aligned} $$利用欧拉公式:
$$ e^{j\omega_d t}-e^{-j\omega_d t}=2j\sin(\omega_d t),\quad e^{j\omega_d t}+e^{-j\omega_d t}=2\cos(\omega_d t) $$可得:
$$ \begin{aligned} y(t) &= 1+ \frac{1}{2j\omega_{d}}e^{-\sigma t}\left[ -2j\sigma\sin\omega_d t -2j\omega_d\cos\omega_d t \right] \\ &= 1+ \frac{1}{2j\omega_{d}} \cdot (-2j) e^{-\sigma t}(\sigma\sin\omega_d t+\omega_d\cos\omega_d t)\\ &=1 – e^{-\sigma t}\left(\cos\omega_d t+\frac{\sigma}{\omega_d}\sin\omega_d t\right), \quad t \ge 0\\ \end{aligned} $$这是欠阻尼低通型二阶系统在阶跃响应下的标准输出表达式。可以看出,最终的表达式除了指数上升项外,还会包含以频率 $\omega_d$ 振荡的相关项。当 $\zeta \to 0$ 时,此时二阶系统的两个极点会非常接近原点,因此 $\sigma$ 相比 $\omega_d$ 为小量,整体输出表达式还可以化简为:
$$ y(t)=1 – e^{-\sigma t}\cos\omega_d t, \quad t \ge 0 $$若二阶系统的共轭复极点并不能做到离虚轴非常近($\zeta$ 并没有非常接近 0),则 $y(t)$ 表达式中 $\frac{\sigma}{\omega_d}\sin\omega_d t$ 项均不能被忽略,整体输出表达式可以借助三角函数的知识合并为:
$$ y(t) = 1 – \frac{e^{-\sigma t}}{\sqrt{1-\zeta^2}} \sin(\omega_d t + \beta), \ \beta = \arccos\zeta, \ t \ge 0 $$由于二阶系统在有阻尼时,其时域振荡频率会从自然振荡频率 $\omega_n$ 变为 $\omega_d$,因此也会把 $\omega_d$ 称为阻尼振荡频率。
(4) 欠阻尼情况下的关键时域指标
这里不加详细讨论的给出一些欠阻尼情况下的关键时域指标(此部分内容由 DeepSeek 给出,本人仅略作修改)。
峰值时间 $t_p$(第一个峰值出现的时间)
对 $y(t)$ 求导并令其为零,可得:
$$ t_p = \frac{\pi}{\omega_d} = \frac{\pi}{\omega_n\sqrt{1-\zeta^2}} $$- $\zeta$ 越小,$\omega_d$ 越接近 $\omega_n$,峰值时间稍增大;$\zeta$ 增大使 $t_p$ 增大。
- $\omega_n$ 越大,$t_p$ 越小,响应越快。
最大超调量 $M_p$
将 $t_p$ 代入 $y(t)$ 得到峰值 $y(t_p)$:
$$ M_p = y(t_p) – 1 = e^{-\zeta\omega_n t_p} = e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}} $$通常用百分比表示:
$$ M_p\% = 100 \cdot e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}} $$- 仅与 $\zeta$ 有关:$\zeta$ 越大,超调越小。
- $\zeta = 0.5$ 时,$M_p \approx 16.3\%$;$\zeta = 0.707$ 时,$M_p \approx 4.3\%$;$\zeta = 1$ 时,超调为零。
上升时间 $t_r$
其定义常用从 10% 上升到 90% 所需时间,或从 0 到首次到达终值的时间。近似公式:
$$ t_r \approx \frac{1.8}{\omega_n} \quad (\text{当 } \zeta \approx 0.5) $$精确表达式(从 0 到终值):
$$ t_r = \frac{\pi – \beta}{\omega_d} = \frac{\pi – \arccos\zeta}{\omega_n\sqrt{1-\zeta^2}} $$- $\omega_n$ 越大,$t_r$ 越小。
- $\zeta$ 增大时,$\beta$ 增大,$\pi-\beta$ 减小,但 $\omega_d$ 也减小,综合效果是 $t_r$ 稍有增加(通常可忽略,主要靠 $\omega_n$ 调节速度)。
调节时间 $t_s$
响应进入并保持在终值 ±2%(或 ±5%)误差带所需的最小时间。经验公式:
$$ t_s \approx \frac{4}{\zeta\omega_n} \quad (\text{2\% 误差带}),\ t_s \approx \frac{3}{\zeta\omega_n} \quad (\text{5\% 误差带}) $$- 调节时间与 $\zeta\omega_n$ 成反比。$\zeta\omega_n$ 称为衰减系数,决定了包络线衰减速度。
简单总结
| 指标 | 表达式 | 主要影响因素 |
| 峰值时间 $t_p$ | $\frac{\pi}{\omega_n\sqrt{1-\zeta^2}}$ | $\omega_n$(反比),$\zeta$(稍影响) |
| 超调量 $M_p\%$ | $100 e^{\frac{-\zeta\pi}{\sqrt{1-\zeta^2}}}$ | 仅 $\zeta$($\zeta$ 越大,超调越小) |
| 上升时间 $t_r$ | $\frac{\pi – \arccos\zeta}{\omega_n\sqrt{1-\zeta^2}}$ | 主要是 $\omega_n$(反比) |
| 调节时间 $t_s$ | $\frac{4}{\zeta\omega_n}$ (2%) | $\zeta\omega_n$(乘积越大,调节越快) |
综合输出波形和时域指标表达式可以看出,对于欠阻尼型低通二阶系统,极点越靠近虚轴,其单位阶跃响应的振铃幅度越大,振铃时间越长。这就是极点位置在时域上对二阶系统影响的体现。
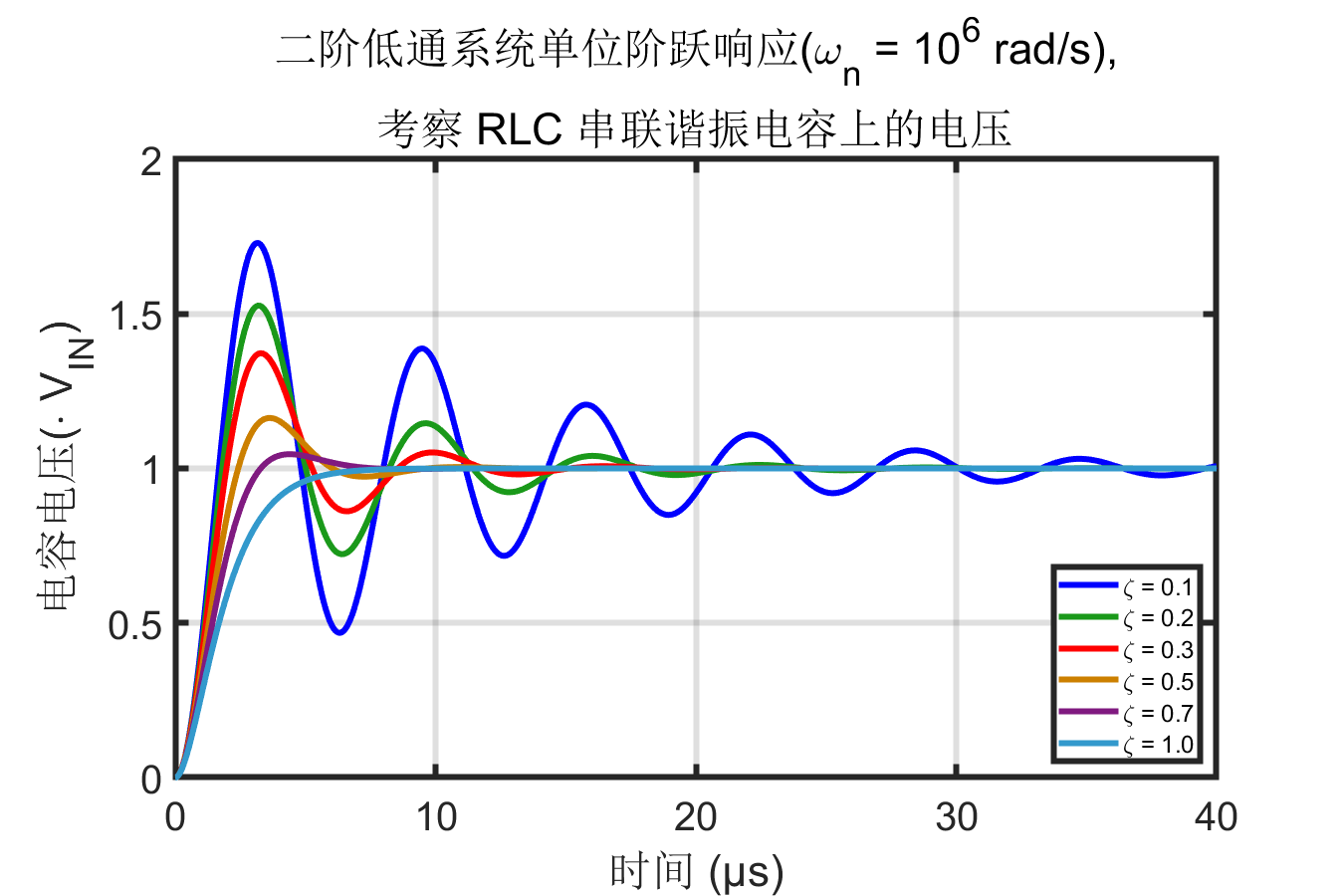
(5) 时域波形
图 34 所示为为一个 RLC 串联谐振网络电容电压在单位阶跃输入下的输出时域响应。对于 RLC 串联谐振网络而言,串联电阻越小,阻尼系数越小,振荡峰值电压越大,同时振荡时间也越久。
3.4.2 带通型传递函数
对于带通型传递函数的时域响应的典型例子为一个 RLC 并联谐振网络在输入电流源驱动下的并联电压响应,如图 35 所示。
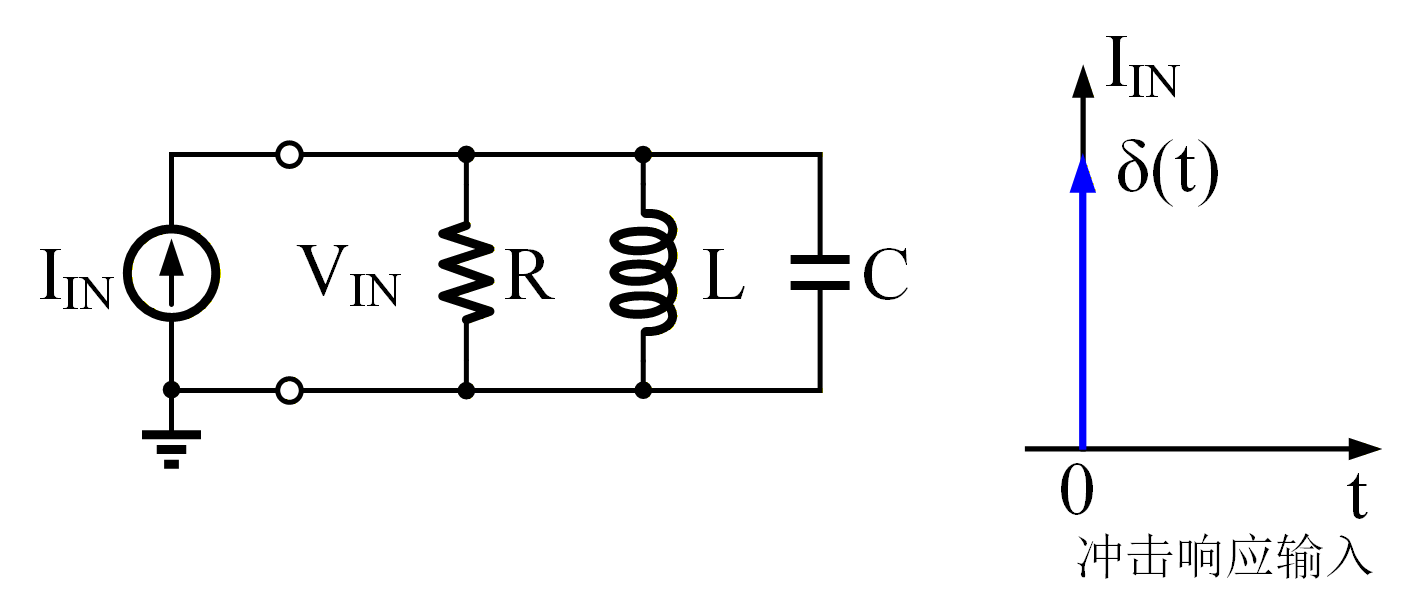
对于 RLC 并联谐振网络,在上文所述的标准带通型传递函数中,取 $K=\frac{1}{C}$ 即可得到其输入电流到并联电压的传递函数表达式 ($H(s) = \frac{V_{IN}}{I_{IN}}$)。由于带通系统通常需要具备选频、滤波等特性,Q 值通常较高,因此这里只分析欠阻尼情况下的单位冲击响应。系统在单位阶冲击输入后的输出的拉普拉斯变换表达式为:
$$ \begin{aligned} H(s) &= \mathcal{L}\{\delta(t)\} \cdot H_{BP}(s)\\ &= \frac{1}{C} \cdot \frac{s}{s^2 + 2\zeta \omega_n s + \omega_n^2}\\ &= \frac{1}{C} \cdot\frac{s}{(s-\omega_{p1})(s-\omega_{p2})} \end{aligned} $$带通传递函数的极点为:
$$ \omega_{1,2} = -\zeta\omega_n \pm j\omega_n\sqrt{1-\zeta^2} = -\sigma \pm j\omega_d $$中 $\sigma = \zeta\omega_n$,$\omega_d = \omega_n\sqrt{1-\zeta^2}$(欠阻尼 $0<\zeta<1$)。
首先让我们利用本节最开始给到的部分分式展开公式进行部分分式展开:
$$ H(s) = \frac{1}{C} \cdot \frac{1}{\omega_1-\omega_2}\left( \frac{\omega_1}{s-\omega_1} – \frac{\omega_2}{s-\omega_2} \right) $$利用单边拉普拉斯反变换,可以得到时域表达式为:
$$ h(t) = \mathcal{L}^{-1}\{H(s)\} = \frac{1}{C} \cdot\frac{1}{\omega_1-\omega_2}\left( \omega_1 e^{\omega_1 t} – \omega_2 e^{\omega_2 t} \right), \quad t \ge 0 $$代入 $\omega_1 = -\sigma + j\omega_d$,$\omega_2 = -\sigma – j\omega_d$,$\omega_1-\omega_2 = 2j\omega_d$:
$$ \begin{aligned} h(t) &= \frac{1}{2C} \cdot\frac{1}{j\omega_d}\left[ (-\sigma + j\omega_d)e^{(-\sigma + j\omega_d)t} – (-\sigma – j\omega_d)e^{(-\sigma – j\omega_d)t} \right]\\ &= \frac{1}{2C} \cdot\frac{1}{j\omega_d} e^{-\sigma t} \left[ (-\sigma + j\omega_d)e^{j\omega_d t} – (-\sigma – j\omega_d)e^{-j\omega_d t} \right] \end{aligned} $$利用与上一节计算低通传递函数单位阶跃响应类似的方式,可以将表达式化简为:
$$ \begin{aligned} h(t) &= \frac{1}{2C} \cdot\frac{1}{j\omega_d}\left[\sigma(e^{-j\omega_d t} – e^{j\omega_d t}) + j\omega_d(e^{j\omega_d t} + e^{-j\omega_d t})\right]\\ &= \frac{1}{2C} \cdot\frac{1}{j\omega_d} e^{-\sigma t} \cdot 2j(\omega_d\cos\omega_d t – \sigma\sin\omega_d t)\\ &= \frac{1}{C} \cdot e^{-\sigma t} \left( \cos\omega_d t – \frac{\sigma}{\omega_d}\sin\omega_d t \right) \quad t \ge 0 \end{aligned} $$这是欠阻尼带通型二阶系统在冲击响应下的标准输出表达式。可以看出,最终的表达式除了指数衰减项外,还会包含以频率 $\omega_d$ 振荡的相关项。当 $\zeta \to 0$ 时,此时二阶系统的两个极点会非常接近原点,因此 $\sigma$ 相比 $\omega_d$ 为小量,整体输出表达式还可以化简为:
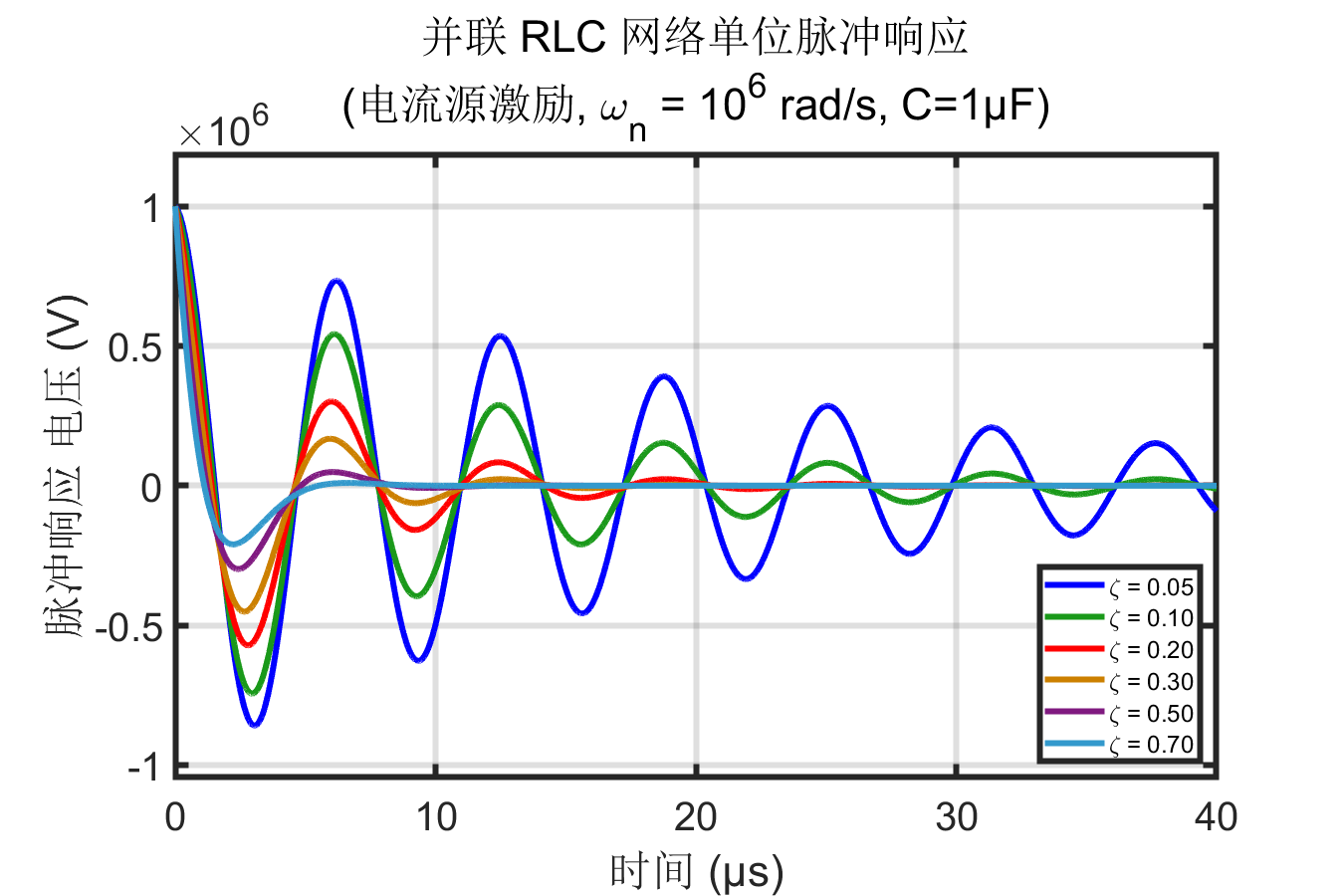
$$ y(t)=\frac{1}{2C} \cdot e^{-\sigma t} \cos\omega_d t \quad t \ge 0 $$综合输出表达式可以看出,对于欠阻尼型带通二阶系统,极点越靠近虚轴,其单位阶跃响应的振铃时间越长。图 36 所示为为一个 RLC 并联谐振网络并联电压在单位冲击输入下的输出时域响应,其输出呈现振荡衰减,包络线为 $e^{-\sigma t}$。 $0_+$ 时刻其值为 $\frac{1}{C}$,这与一个冲击电流源向电容上充电后的电压值相等。对于 RLC 并联谐振网络而言,并联电阻越高,衰减越慢,振荡所能维持的时间也越久。
3.5 由一阶和二阶系统组成高阶系统
文章最开始就提到过,在工程设计中,高阶系统通常可以由一阶和二阶系统组成。最后就让我们来讲一下如何使用一阶系统和二阶系统组成高阶系统。接下来本人将使用高阶滤波器设计进行举例,为大家展示如何使用一阶系统和二阶系统组成高阶系统。
例如,假设现在想要设计一个通带带宽为 1,带内纹波小于 0.05dB,在 2 频率处抑制 40dB 的切比雪夫滤波器,如果直接使用滤波器设计软件,它很可能会给你返回这样一个传递函数:
$$ H(s) = \frac{0.020413}{s^7 + 2.146501 s^6 + 2.753831 s^5 + 2.207961 s^4 + 1.281236 s^3 + 0.532174 s^2 + 0.146333 s + 0.020413} $$乍一看,这是一个分母为七阶的多项式,基本是不可能把它转化为一个明确的电路结构的。但是,不要被这个表达式的表面所吓倒,通常设计软件还会同时给出这个表达式对应的极点:
$$ \begin{aligned} p_{1,2} &= -0.094367 \pm j1.058355 \\ p_{3,4} &= -0.264041 \pm j0.849071 \\ p_{5,6} &= -0.382058 \pm j0.471229 \\ p_7 &= -0.423834 \end{aligned} $$可以看出,即使是复杂如此的表达式,所对应的极点无非是实极点或者共轭复极点罢了。知道极点后,就可以对其进行因式分解了:
$$ H(s) = \frac{K}{(s – p_1)(s – p_2)\cdot(s – p_3)(s – p_4)\cdot(s – p_5)(s – p_6)\cdot(s – p_7)} $$其中 $K = \prod_{i=1}^{7} (-p_i)$(即各极点相反数的乘积),使得 $H(0)=1$。由于每个二阶系统对应一对共轭极点 $-\sigma \pm j\omega_d$,其自然频率 $\omega_n = \sqrt{\sigma^2 + \omega_d^2}$,阻尼系数 $\zeta = \sigma / \omega_n$,根据这一点,就可以对零极点进行一二阶系统的拆分了:
$\omega_{p7}$ 为一个实轴上的极点,其可以对应为一个一阶系统:
$$ H_0(s) = \frac{\omega_{p7}}{s + \omega_{p7}}, \quad \omega_{p7} = 0.423834 $$$p_{1,2}$, $p_{3,4}$, $p_{5,6}$ 为三个共轭复极点对,可以分别对应三个二阶系统:
| 子系统 | 极点对 | $\omega_n$ | $\zeta$ | 传递函数 $H_i(s) = \dfrac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2}$ |
| 1 | $p_{1,2}$ | $1.06255$ | $0.08881$ | $H_1(s) =\dfrac{1.1290}{s^2 + 0.1887s + 1.1290}$ |
| 2 | $p_{3,4}$ | $0.8892$ | $0.2970$ | $H_2(s)= \dfrac{0.7906}{s^2 + 0.5281s + 0.7906}$ |
| 3 | $p_{5,6}$ | $0.60666$ | $0.6298$ | $H_3(s) =\dfrac{0.3680}{s^2 + 0.7641s + 0.3680}$ |
由此整体传递函数即可由一阶系统和二阶系统组合而成:
$$ H(s) = H_0(s) \cdot H_1(s) \cdot H_2(s) \cdot H_3(s) $$至此,我们就成功使用了一阶系统和二阶系统表示一个高阶系统。
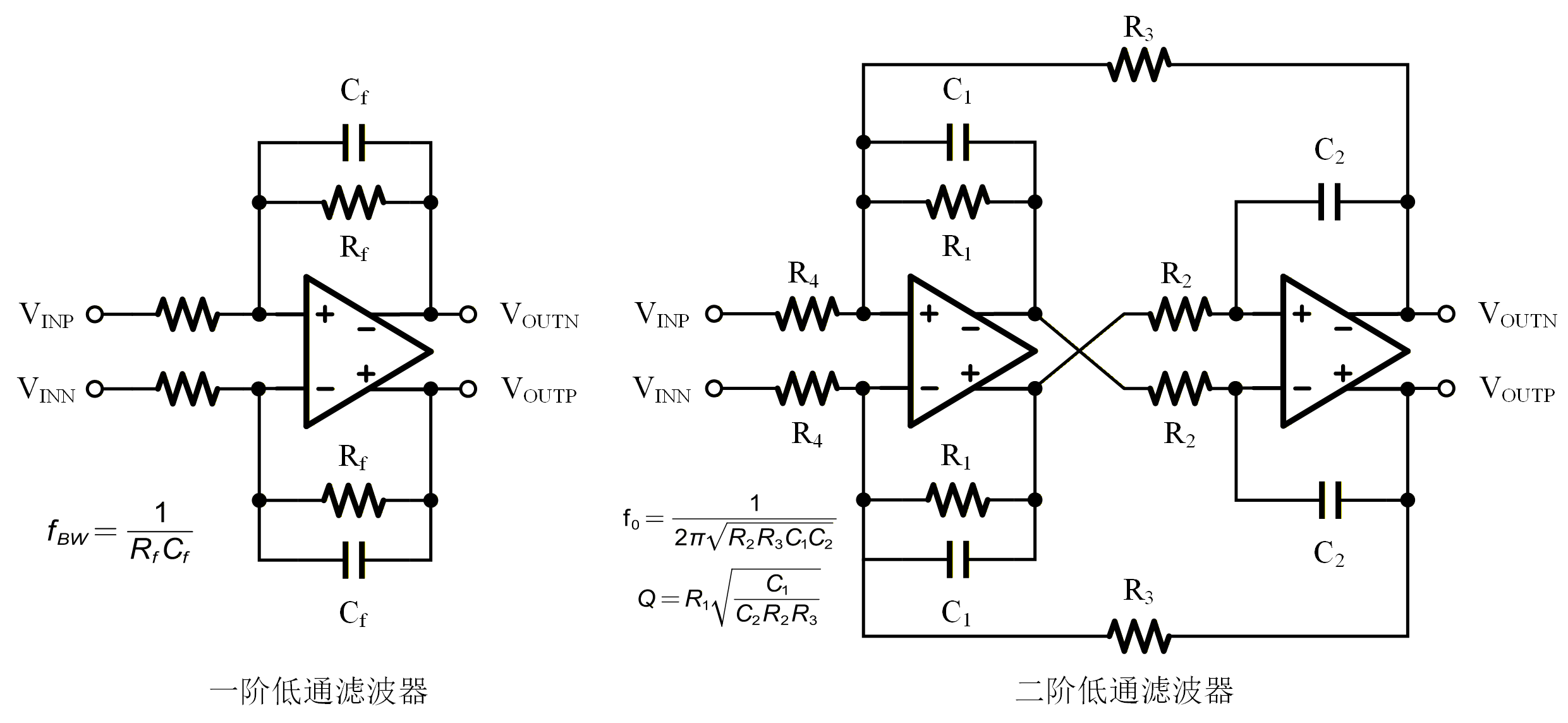
接下来就是针对每个传递函数进行相应的电路参数设计了。对于有源低通滤波器,其一阶形式和二阶形式均有其对应的电路,通过调整电路参数就可以实现不同的传递函数值。图 37 是一阶滤波器和二阶滤波器对应的两个电路的例子,通过级联一个一阶滤波器电路和三个二阶滤波器电路,并设计好对应参数即可完成整体七阶滤波器的设计。
4 总结
理解谐振网络和二阶系统,就等于掌握了模拟电路中所有线性时不变系统的分析基础。本文通过 RLC 谐振的直观物理图景(串联短路、并联开路、Q值与带宽的反比关系)、三点快速分析法(DC-谐振-高频)、向量图示法(将复数运算化为几何问题)以及极点的核心视角,帮助设计者无需繁琐推导即可快速建立对电路频域特性(带宽、峰值、相移)与时域响应(振荡、超调、调节时间)的直觉,从而高效分析与设计滤波器、放大器等复杂模块。
致谢
本文中的内容参考邱关源《电路》第五版、张爱民《自动控制原理》第二版、西安交通大学张鸿老师模拟 IC 设计课程以及复旦大学某老师(为防止线下物理开盒暂匿,毕业解匿)的 IC 设计课程,结合本人对电路的理解总结而成。DeepSeek 参与了文章中二阶系统时域特性相关内容中的部分公式推导和结论总结,以及摘要和总结的撰写。